Среди роботов, действующих на промышленных предприятиях мира, примерно 95% относятся к первому поколению. Роботы новых типов оснащаются чувствительными устройствами, например телекамерами и датчиками усилия, которые позволяют получать хоть какую-то информацию о внешнем мире. Такая информация поступает на компьютеры, управляющие роботами, и те могут оперативно корректировать программы с учетом случайных событий. Это пример создания «обратной связи». Коллективы научно-исследовательских лабораторий прилагают большие усилия, чтобы вывести такие устройства «второго поколения» из стадии опытных разработок и внедрить их на производственные предприятия. Об этом рассказывается в главе «Робот и его окружение».
Еще более совершенны роботы «третьего поколения», которые пока находятся в «младенческом возрасте». Мозгом такого робота будет скорее всего не обычный компьютер, а ЭВМ, работа которой основана на принципах искусственного интеллекта. Современный компьютер функционирует в строгом соответствии с заложенной в нем программой. Команды программ могут корректироваться с учетом информации от других источников, например (как в роботах второго поколения) от датчиков. Тем не менее такие компьютеры не способны выстраивать цепочки логических рассуждений и давать ответы на возникающие вопросы, исходя из элементарных логических посылок. Системы второго поколения принимают решения чисто «рефлекторно» — как реакцию на случайное внешнее событие. Что же касается робота третьего поколения, то он будет самостоятельно вырабатывать стратегию действий в ответ на событие, нарушившее порядок его работы. Такие системы смогут служить не только для выполнения простых производственных операций. Не исключено, что они будут играть заметную роль в нашей повседневной жизни — работая по дому, убирая улицы или даже помогая пилоту в решении несравненно более сложных задач. Принципы действия роботов третьего поколения мы рассмотрим более детально в главе «Искусственный интеллект».
В «разумных» роботах будущих поколений должны быть предусмотрены технические средства для реализации принципиально новых функциональных возможностей. В своей книге «Практическая роботика» Джозеф Энгелбергер перечисляет их: 1) простейшие формы машинного «зрения»; 2) восприятие тактильных ощущений; 3) интерпретация визуальной и тактильной информации с помощью ЭВМ; 4) взаимная согласованность движений нескольких «конечностей» робота; 5) перемещение конечностей по траекториям, задаваемым компьютерами; 6) мобильность; 7) минимальный объем зоны действия манипулятора; 8) энергосберегающий характер «мускулатуры» (т. е. наличие механизмов, которые способны поднимать тяжелые грузы и переносить их на значительное расстояние, затрачивая малую энергию); 9) универсальность захватных приспособлений; 10) речевое общение с человеком; 11) самодиагностика с целью локализации отказов; 12) безопасность для обслуживающего персонала, заложенная в самой конструкции роботов. Энгелбергер отмечает: «Роботы по своим возможностям никогда не смогут приблизиться к человеку с его тонкостью чувств, непринужденностью мышления и суждений, эстетическим восприятием действительности, самовоспроизводимостью, эффективным механизмом преобразования пищи в энергию и клетки тела, способностью самовосстанавливаться после многочисленных болезней и ранений. Пропасть между человеком и роботом будет сохраняться всегда; но, хотя ее и невозможно устранить полностью, по мере развития техники она будет сокращаться».
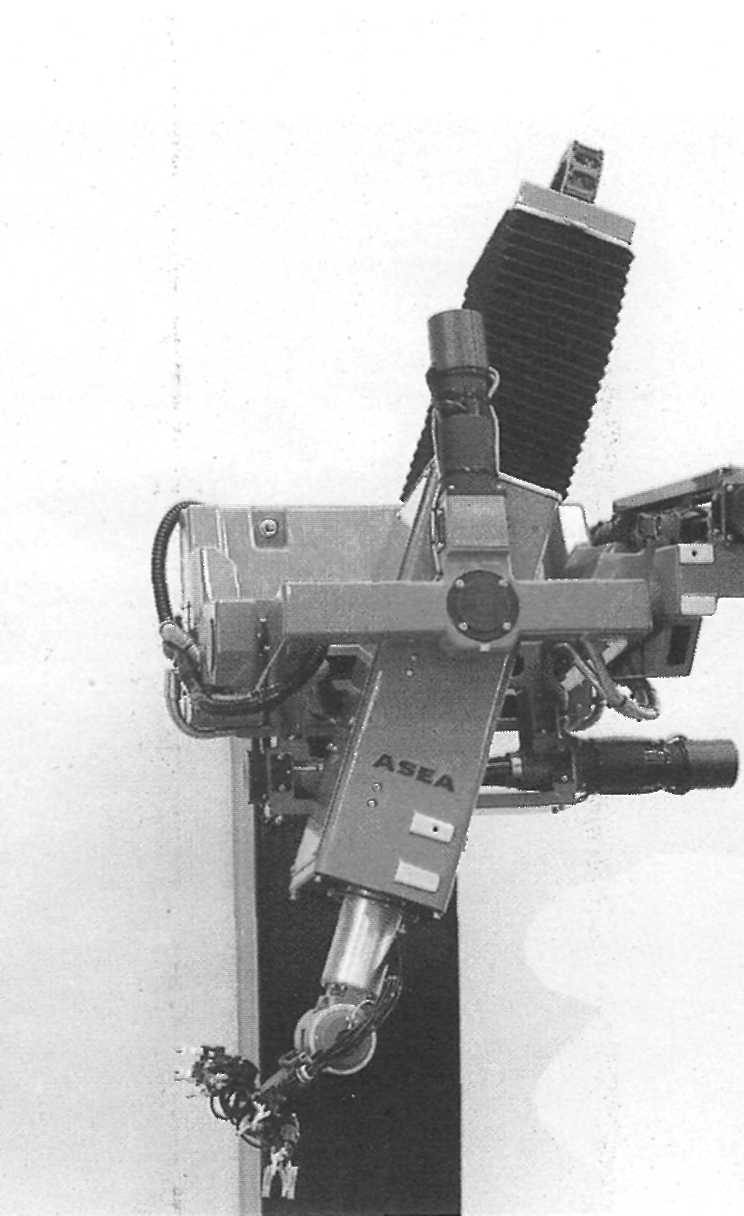
Система IRB 10ОО фирмы ASEA оснащена адаптивным захватным механизмом «Малтигрип», где одновременно может использоваться до восьми различных схватов с двумя или тремя пальцами.
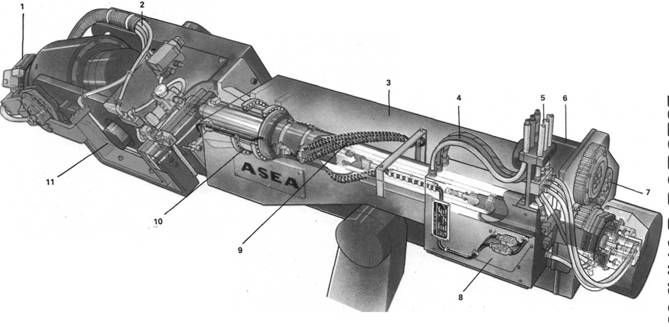
Анатомия робота. 1 — узел охвата, на котором монтируется сварочный пистолет; 2 — комплексная система подачи воды, воздуха и электрического тока (WAC); 3 — пневматически стабилизируемый манипулятор; 4 — сетевое питание; 5 —шланги для подачи воды и воздуха; 6 — электродвигатель постоянного тока с сервоуправлением; 7 — редуктор; 8 — трансформатор; 9 — линии питания электродвигателей постоянного тока; 10 — локтевое сочленение, обеспечивающее вращение манипулятора; 11 — локтевое сочленение для вертикального перемещения манипулятора. На этой диаграмме показан в разрезе верхний манипулятор робота IRB 90S/2 фирмы ASEA, предназначенный для точечной сварки. Комплексная система WAC обеспечивает подачу электроэнергии на электроды сварочного пистолета, воды — для охлаждения сварного шва и воздуха — на пневматические приводы.

В память робота Т3 746 фирмы «Цинциннати милакрон» с клавиатуры выносного обучающего пульта записывается программа, в соответствии с которой установка вырезает смотровую щель в защитном шлеме пилота и подгоняет по размеру его нижний (шейный) обрез.