За исключением атомной энергетики, масштабы внедрения движущихся роботов в промышленность невелики. Очевидная область применения подобных роботов — подземные работы, точнее, операции, связанные с эксплуатацией трубопроводов. Компания «Бритиш гэс», например, разработала системы под названием «смышленые свинки» (скребки), которые проверяют магистральные газопроводы в процессе их эксплуатации. Под давлением газа эти устройства перемещаются по трубопроводу на расстояния порядка 80 км. По ходу движения они регистрируют информацию о состоянии труб, которая затем (после извлечения устройств из трубопровода) анализируется. Здесь используются устройства двух типов: магнитные зонды для обнаружения потерь металла в стенках трубопровода и ультразвуковые устройства, определяющие местоположение трещин в трубах.
Совершенно очевидно, что в военном деле немало таких неприятных или опасных заданий, выполнение которых желательно было бы поручить машине (если, конечно, она обладает навыками и восприятием, свойственными человеку). При выполнении таких операций, как разминирование местности или разведка в расположении противника, машина не будет озабочена тем, чтобы в первую очередь спасти свою «жизнь». Если же военный робот уничтожит противник, то не составит особого труда заменить его новой машиной. Более того, с помощью защитных устройств подобную машину, возможно, гораздо легче уберечь, чем человека.
Некоторые виды работ не столько опасны, сколько трудны или утомительны, причем до такой степени, что сложно найти людей, которые могли бы выполнять их надлежащим образом: например, оказание систематической помощи инвалидам с парализованными конечностями. Для человека подобная работа крайне утомительна и физически, и психически. Механическое же создание, способное предоставить инвалиду вторую (третью, а то и четвертую) пару конечностей, станет неоценимым изобретением. При доступной цене такие механические помощники могли бы оказать огромную услугу людям, страдающим тяжелыми физическими недугами.
Более сложные роботы, о которых пойдет речь в данной главе, вряд ли получат широкое распространение до 90-х годов. Создание таких машин во многом зависит от прогресса в пяти ниженазванных областях.
Разработка датчиков. Такие устройства, как телекамеры или тактильные датчики, предоставят компьютеру подробную информацию обо всем происходящем вокруг. Эти датчики должны обладать способностью отличать малоинтересный «фон» от более важной информации, на основании которой робот планирует свои дальнейшие действия. Так, движущемуся роботу важно знать форму и местоположение препятствий на его пути. Датчики, например телекамеры с высоким разрешением или дальномеры, должны достаточно быстро предоставлять роботу информацию, позволяющую ему избегать столкновений.
Создание рабочих органов. Это устройства, которые реагируют на сигналы от ЭВМ, координирующие действия робота, и выполняют определенную последовательность действий. В качестве рабочих органов могут использоваться схваты (как у современных промышленных роботов) или движительные устройства, например колеса или гребные винты и толкатели (для подводных применений). Эти устройства должны уметь выполнять очень тонкие операции. Например, при сборе фруктов, уборке урожая или оказании помощи инвалидам рабочие органы должны действовать очень осторожно и с большой ловкостью.
Производство компьютеров. Для управления роботами новых поколений потребуется не один компьютер, а целый иерархический комплекс электронных систем, каждая из которых должна отвечать за конкретный набор функций робота. Современные промышленные роботы, как «правило, выполняют задания в соответствии с фиксированной программой, заложенной в память робота до начала его функционирования. Роботы, действующие вне стен предприятий, могут иметь аналогичные наборы команд, однако они должны приводиться в действие не человеком-оператором, а сигналами от ЭВМ, находящихся на верхнем уровне управляющего иерархического комплекса. Эти компьютеры будут планировать действия робота исходя из информации о внешнем мире, полученной с помощью датчиков. Например, робот-пожарник сможет рассчитать (на основе информации, поступающей от термодатчиков) местоположение очага пожара и направить в эту сторону струи воды.
Компьютеры, применяемые в таких системах, должны отличаться от современных в двух отношениях. Во-первых, они должны очень быстро обрабатывать информацию, поступающую от десятков и даже сотен датчиков, и анализировать ее, прежде чем послать соответствующие команды на рабочие органы. Вполне возможно, что в подобных компьютерах реализуются параллельные методы обработки данных, т. е. они будут одновременно обрабатывать большое число потоков данных (подобно человеческому мозгу, который способен «думать» одновременно о нескольких различных проблемах). В отличие от этого компьютеры середины 80-х годов, как правило, осуществляют последовательную обработку информации: одновременно вырабатывается лишь один поток данных. Во-вторых, компьютеры нового типа должны держать в памяти информацию «общего характера», подобную тем знаниям, что хранятся в головном* мозге каждого человека. Эта информация поможет роботам планировать действия в определенных обстоятельствах Если вернуться к примеру с роботом пожарником, то он должен, в частности знать о различиях в способах борьбы с пламенем в автомобиле или в здании Следовательно, он обязан хранить информацию общего характера об автомобилях и зданиях, а именно об их приблизительных размерах и планировке Существует особая область теории вычислительных систем, так называемая «инженерия знаний», которая зам мается изучением механизмов представления информации такого рода памяти компьютера.
Стратегии управления. Если возле жить на компьютеры лишь планирование стратегий управления роботом различных обстоятельствах, то этого окажется совершенно недостаточно Необходимо найти способ преобразования стратегии управления в действенную реакцию на возникшие обстоятельства. Кроме того, построенные в правильной последовательности сигналы должны передаваться рабочим органам робота с малой задержкой. В противном случае соответствующие команды могут поступить к рабочему органу, когда события во внешнем мире изменятся настолько, что потребуется новая серия команд. При этом существует риск, что робот всегда будет реагировать на несколько устаревшую информацию. Следовательно, предстоит разработать методы не только быстрой, но и эффективной передачи информации. Такую информацию придется передавать рабочему органу по внутренним информационным каналам (аналогичным нервной системе человека). Кроме того, необходимо разработать подходящую форму представления команд, инициирующих последовательность действий, выполняемых несколькими рабочими органами. Например, чтобы шагающий робот перемещался в нужном направлении с определенной скоростью, разные ноги аппарата должны действовать согласованно.
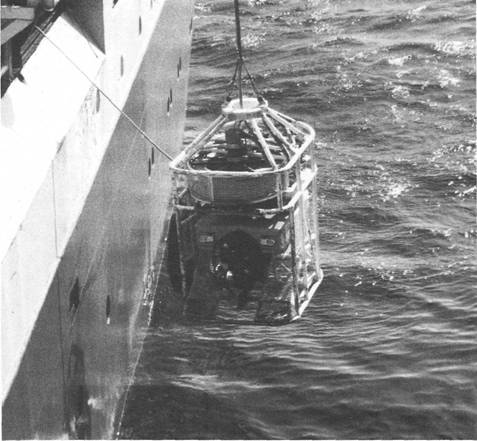
Автоматический аппарат СКОРПИ, служащий для визуальных наблюдений, передает телевизионные изображения бортов корабля и других труднодоступных подводных объектов.
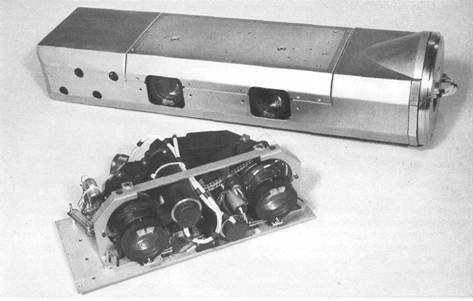
Эта стереоскопическая телевизионная система, предназначенная для атомной промышленности, разработана английскими фирмами «Тейлор хайтек» и «Вижн инджиниринг».
Способы общения с роботами. «Непромышленные» роботы не будут полностью автономными. Операторы должны иметь возможность вмешиваться в их поведение, по крайней мере эпизодически, чтобы изменить характер поведения или передать новые команды, отменяющие команды, выработанные роботом самостоятельно. Очевидно, для этого потребуются каналы связи, по которым человек-оператор мог бы взаимодействовать с роботом. Обычно люди общаются с компьютером с помощью клавиатуры, однако в будущем, если роботы станут действенными помощниками во многих сферах жизни, понадобятся более быстродействующие и удобные способы «общения» с ними. Не исключено, что люди смогут отдавать роботам различные приказы голосом. Для этого необходимо, чтобы компьютеры работали под управлением программ распознавания речи, с помощью которых электронные устройства будут преобразовывать устные сообщения в наборы двоичных знаков, понятных компьютеру.
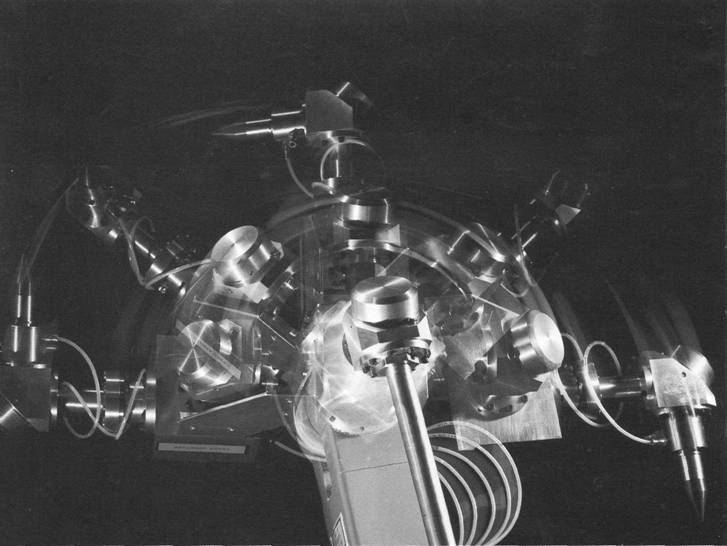
Рабочий орган КОБРА, разработанный в Калемской лаборатории Комиссии по атомной энергии Великобритании, позволяет проводить осмотр внутренних частей реакторов атомных электростанций.
Для полноценного развития рассмотренных выше областей техники потребуется по крайней мере десятилетие. В ближайшем будущем использование «непромышленных» роботов в основном сведется к экспериментам с телеуправляемыми (дистанционно управляемыми) системами и манипуляторами, которыми они оснащены. Подобные системы будут перемещаться на колесах или гусеницах с большой точностью, выполняя такие же операции, как и роботы. Телеуправляемые манипуляторы отличаются от обычных роботов тем, что каждое их действие в данный момент копирует действие человека-оператора. Если обычный робот способен выполнять определенное задание без участия человека, то действия телеуправляемого манипулятора должны постоянно контролироваться человеком-оператором.
Телеуправляемые манипуляторы используются в некоторых отраслях промышленности (например, на атомных электростанциях) уже более тридцати лет. Управление ими осуществляется обычно одним из трех способов.
Копирование движений задающей руки. Оператор с помощью «задающей» руки осуществляет последовательность движений, которую повторяет «исполнительная' рука. Последняя выполняет необходимые действия, например операции технического обслуживания в опасной для человека среде на химическом заводе.
Управление с помощью наборов переключателей. Исполнительная рука перемещается в соответствии с электрическими сигналами, поступающими с довольно простого блока управления. Так, с помощью одного переключателя можно заставить руку двигаться направо или налево; другой переключатель регулирует темп работы манипулятора; еще один переключатель задает положение схвата руки манипулятора. Этот грубый способ управления непригоден для работ, где требуется высокая точность движений.
Ручка управления. В данном случае оператор регулирует действия дистанционно управляемого робота подобно тому, как летчик перемещает управляющие элементы самолета с помощью небольшого рычага — ручки управления. Этот способ управления предпочтительнее, чем управление переключателями, так как обеспечивает выполнение согласованных движений под контролем компьютера.
Важнейшим элементом телеуправляемых систем является линия связи — проводная, радио или волоконно-оптическая — между человеком-оператором и роботом. Существенную роль играют не только сигналы, идущие к роботу, но и поступающая от него информация. Она позволяет оператору судить о текущей обстановке. Обычно эта информация поступает от одной или более телекамер; она включает в себя изображения объектов, находящихся вблизи робота. Может передаваться и другая информация, например регистрируемые роботом звуки или рентгеновские изображения. Теоретически возможно предоставить оператору такое количество информации, которое позволило бы ему мысленно представлять обстановку так, как если бы он сам находился на месте манипулятора. Сегодня решение данной проблемы находится в центре внимания исследователей; в частности, в США разработка необходимых систем передачи информации связана прежде всего с перспективами использования телеуправляемых роботов для освоения космоса (см.также гл. «Роботы в космосе»).
Кроме атомной промышленности телеуправляемые аппараты найдут применение в военном деле (например, для обезвреживания бомб), в подводных работах и в космосе. Во всех этих случаях необходимы машины, которые выполняли бы трудные задания там, где пребывание людей сопряжено с опасностью или просто неприятно. Ведется разработка телеуправляемых манипуляторов, наделенных некоторой автономностью. Примером может служить подводный аппарат, передающий на берег телевизионные изображения, например, трубопроводов или остатков потерпевших крушение кораблей. Телеуправляемый манипулятор, наделенный «собственными» средствами управления, во многом походит на настоящего робота.
Отказ от разделения роботов на телеуправляемые и «настоящие», автономные, принесет определенную пользу. Роботы, в которых предусмотрена возможность перехода от автономного режима работы на режим управления по командам человека-оператора, по всей вероятности, окажутся более полезными, чем устройства, работающие лишь в одном из этих режимов. Такие аппараты называются гибридными роботами. Они будут действовать подобно овчаркам, стерегущим овец и выполняющим большую часть своих постоянных обязанностей самостоятельно, полагаясь лишь на органы чувств и инстинкты; но при этом они остаются в подчинении хозяина-человека, который в нужные моменты может отдавать им приказы координационного характера — например, какую отару овец стеречь или в каком направлении гнать животных.
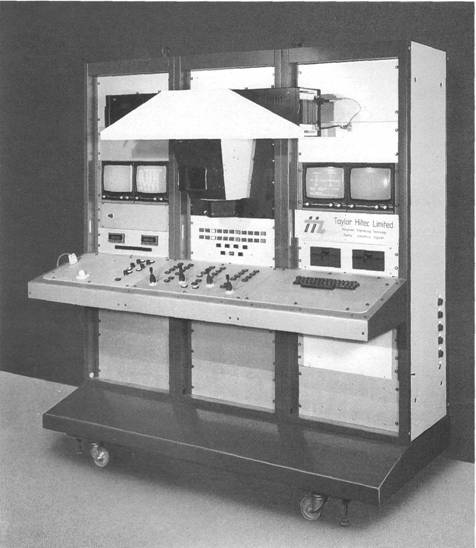
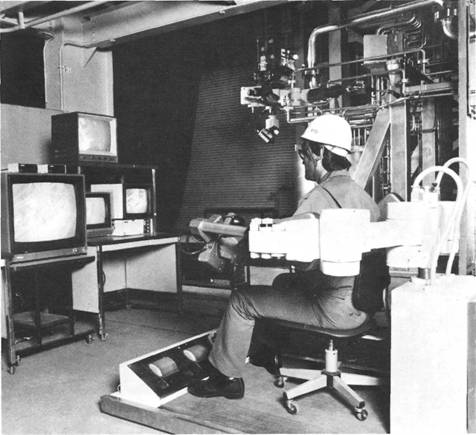
С этого пульта оператор с помощью стереоскопической ТВ-системы осуществляет дистанционное управление манипулятором комплекса (фирма «Тейлор хайтек»), предназначенного для осмотра внутренних помещений атомной электростанции.
Одним из сторонников создания гибридных роботов является Роберт Фрош, бывший администратор НАСА, в настоящее время возглавляющий исследовательские лаборатории компании «Дженерал моторе» (шт. Мичиган). Фроша главным образом интересуют возможности использования этих аппаратов для работы в космосе, однако его соображения по этому поводу в равной степени относятся и к другим областям применения роботов. В 1983 г. в сентябрьском номере журнала Spectrum, издаваемого Институтом инженеров по электротехнике и радиоэлектронике (ИИЭР), Фрош писал: «Относительно взаимоотношения людей и машин в космосе мнения специалистов расходятся. Исторически сложилось непонимание между теми, кто считает, что все работы в космосе должны выполняться людьми, и теми, кто намерен все это поручить машинам. При этом удивительно мало внимания уделялось изучению возможностей совместной работы людей и машин. Не следует думать, что машины либо очень умны, либо наоборот, что у них полностью отсутствуют интеллектуальные способности, а люди непременно или гораздо надежнее, или менее надежны, чем машины. Комбинация человек — машина имеет большую надежность, чем каждый из этих компонентов в отдельности. Целесообразнее организовать совместную работу нескольких людей, наделенных высокими интеллектуальными способностями, с множеством машин, имеющих средние (умственные способности).
Дистанционное управление копирующим манипулятором требует специальных навыков. На фотографии показано, как техник на заводе по регенерации ядерного топлива (Токай, Япония) управляет двуруким манипулятором с двумя степенями свободы.

В Харуэллской лаборатории Комиссии по атомной энергии Великобритании разработан гусеничный робот РОМАН, который может передвигаться в опасных зонах. Оператор управляет роботом с помощью специальной ручки.
Одна из основных областей, где уже используются телеуправляемые аппараты и гибридные роботы, — военное дело. Ведутся интенсивные работы по созданию автономных роботов, которые найдут применение на поле боя, а также в операциях за линией фронта, например в разведке. Особый вид деятельности, где подобные роботы нашли применение, представляет собой обезвреживание бомб. Эти устройства стали разрабатываться в 70-х годах для борьбы с терроризмом, ставшим поистине бедствием конца двадцатого столетия. До появления автоматических аппаратов работу по обезвреживанию бомб приходилось выполнять людям, что было очень опасно.
Все телеуправляемые аппараты для обезвреживания бомб оснащены телекамерами и манипуляторами, а управление ими осуществляется оператором с использованием проводной или радиосвязи. Обычно после обнаружения *бомбы составляется карта ее местонахождения. До появления телеуправляемых аппаратов бомбу обезвреживали вручную, снимая с нее защитный кожух, а затем выводя из строя детонатор. Последняя операция обычно выполняется одним из двух способов: либо отсоединяется детонатор, что требует от сапера очень точных действий и сопряжено с большой опасностью, либо бомбу просто взрывают, но так чтобы причинить как можно меньше разрушений.