Вторым по значению компонентом робота — после механической руки — является источник энергоснабжения, который обеспечивает энергию, необходимую для движения звеньев манипулятора в каждом из его сочленений Исполнительные приводы, которые управляются командами программы, заложенной в компьютере робота, задают характер выполнения конкретной операции.
В современных роботах, как правило, применяются источники энергоснабжения трех типов: электрические, гидравлические и пневматические. Электрические системы работают на двигателях постоянного или переменного тока, подобных тем, которые используются в многих изделиях бытового и промышленного назначения. Каждым сочленением робота управляет отдельный электродвигатель, а он в свою очередь приводится в действие сигналами, поступающими по кабелю, который проложен вдоль конструктивных элементов манипулятора. Многие изготовители роботов отдают предпочтение электрическим приводам, поскольку они бесшумны, потребляют относительно мало энергии и обеспечивают высокую точность перемещения механических узлов робота.

В гидравлических системах (они первоначально и применялись для снабжения роботов энергией) движущее усилие создается жидкостью, например маслом, нагнетаемым под высоким давлением через трубки. Гидравлический привод, однако, имеет серьезный недостаток: его трубки могут давать течь, причем вероятность этого особенно велика в той атмосфере беспорядка, что царит на многих предприятиях. Насос гидравлического привода потребляет энергию не только во время работы, но и когда бездействует. Это вызвано необходимостью поддерживать давление жидкости. Таким образом, гидравлические системы обычно расходуют больше энергии, чем электрические. С другой стороны, гидравлический привод позволяет поднимать грузы большей массы, и поэтому им, как правило, оснащаются роботы, предназначенные для тяжелых работ.
Устройства с пневматическим приводом считаются «бедными родственниками» в семействе роботов. Пневматические исполнительные механизмы, приводимые в движение сжатым воздухом, не обеспечивают достаточной точности управления при сложных маневрах. Кроме того, такие
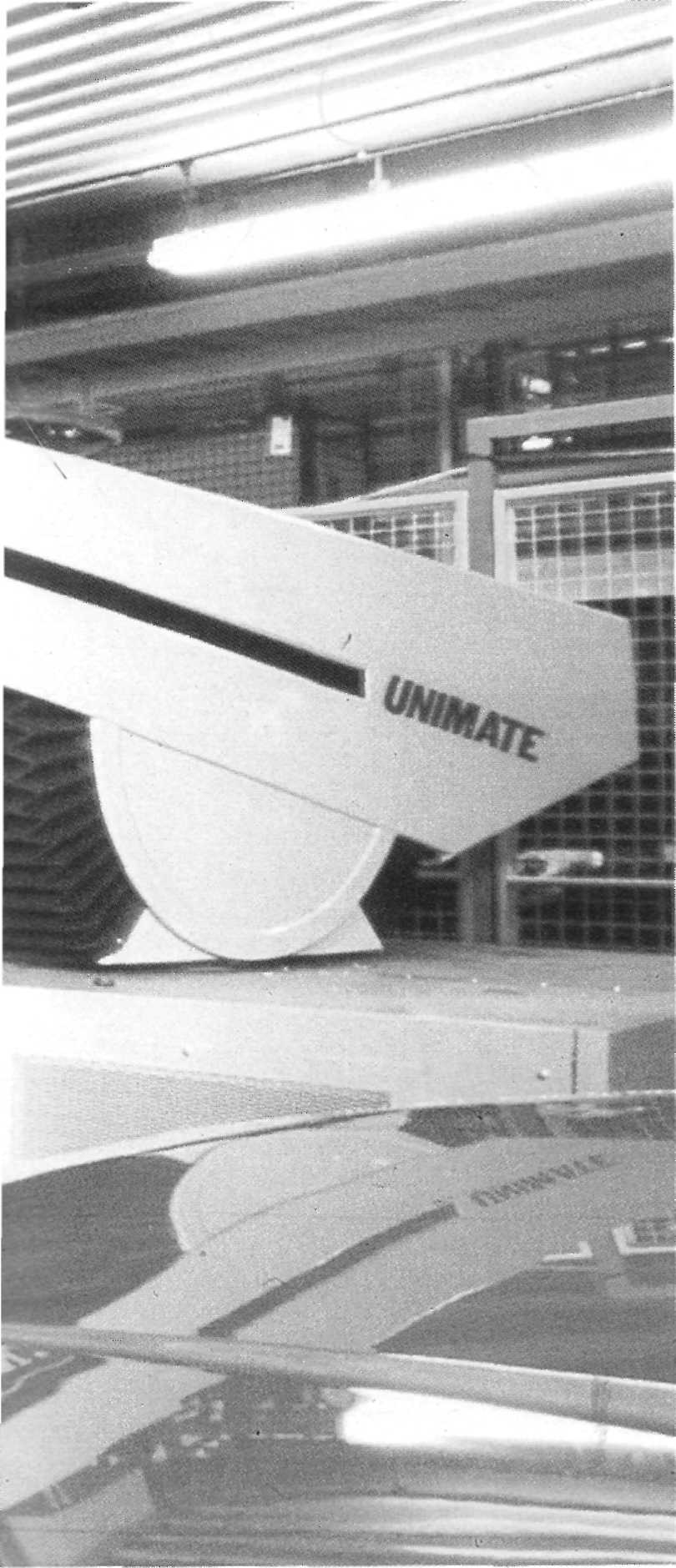
Первый промышленный робот был построен компанией «Юнимейшн», и с тех пор робот стал одним из главных участников производственного процесса; показанный на снимке крупногабаритный робот «Юнимейт» работает на линии по производству автомобилей «Ровер монтего» в Остине — автоматически вставляет задние стекла.
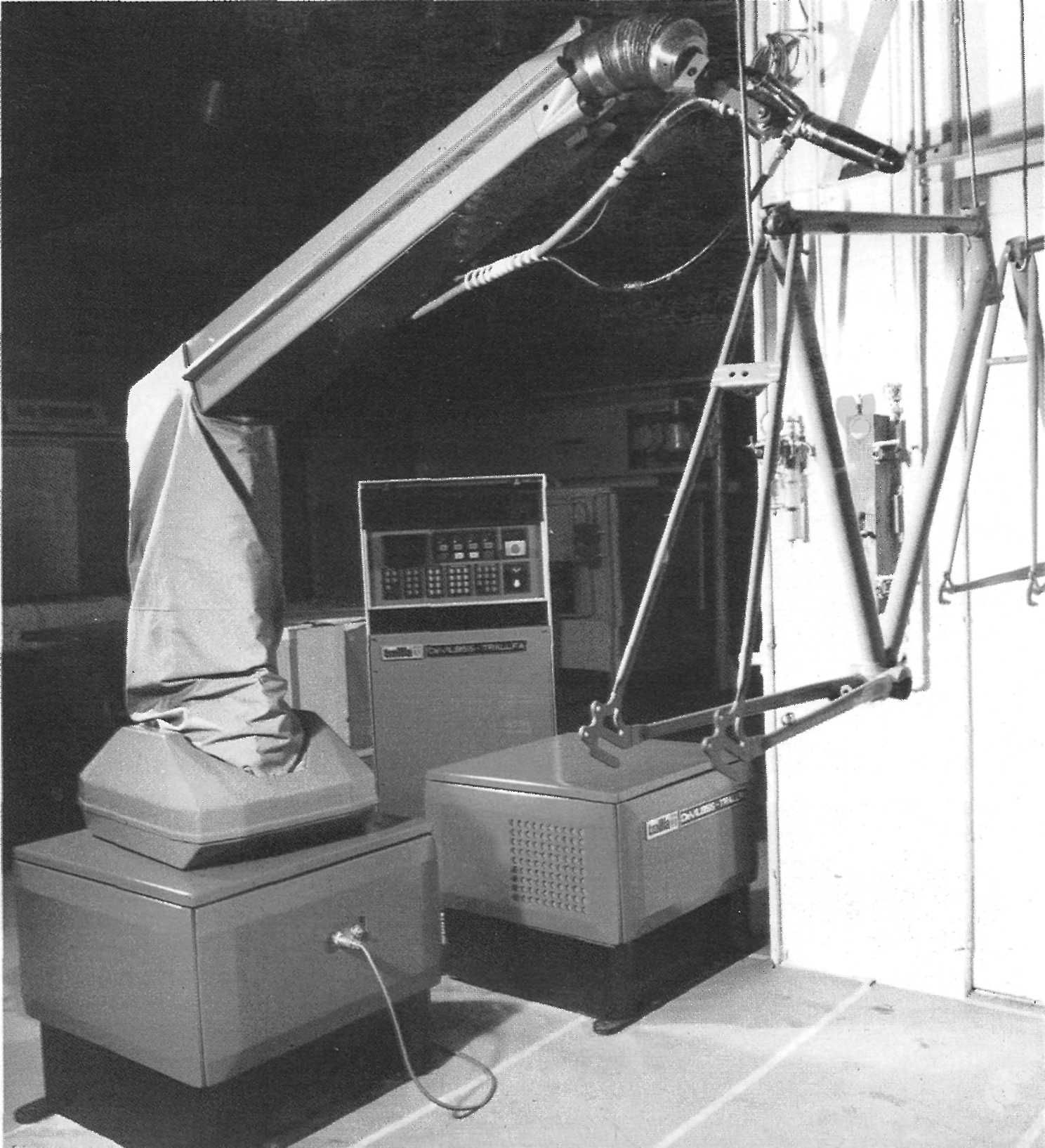
Робот TR-4000 фирмы «Тралльфа» окрашивает велосипедные рамы методом распыления; на снимке видны отдельные части системы: устройство управления, манипулятор и гидравлический силовой блок.
механизмы создают сильный шум, а в их воздуховодах могут возникать течи. Пневматические системы чаще всего применяются в тех случаях, когда робот выполняет требуемые операции посредством ряда прямолинейных перемещений, скажем из точки А в точку В.
Третьим важнейшим компонентом робота является система управления, где главную роль, как правило, играет компьютер. В его электронной памяти записаны двоичные коды наборов команд (программ), которые задают режимы работы всех электродвигателей робота, обеспечивающих выполнение нужной операции. В программах заложены также команды для управления вспомогательными устройствами, используемыми совместно с роботом. Например, программа для сварочного робота задает величину электрического тока, который должен протекать через сварочный пистолет в «руке» робота в конкретный момент времени в процессе приварки металлических пластин разной толщины.
По типу системы управления роботы подразделяются на три основные категории: с позиционным управлением без сервосистемы, с системой позиционного сервоуправления и с контурной системой сервоуправления. Эти категории отражают степень сложности тех операций, которые способен выполнять робот. В самых совершенных роботах используются серводвигатели, т. е. исполнительные устройства, обеспечивающие перемещение с высокой точностью. Любой серводвигатель содержит элементы обратной связи, оценивающие разность между реальным положением вала электродвигателя и тем положением, которое он в данный момент должен занимать в соответствии с программой. Устройствами обратной связи, как правило, служат электрические компоненты, в частности потенциометры, которые посылают сигналы в компьютер, управляющий роботом. Подобная сервосистема позволяет автоматически корректировать малейшие погрешности в выполнении операций, чем обеспечивается высокая точность, а следовательно, и воспроизводимость движений робота.
Наиболее примитивными являются роботы с позиционным управлением без сервосистемы. Иногда их называют подъемно-транспортными роботами. Их возможности весьма ограниченны: они, например, способны передвигаться от одной точки к другой, но программой не предусматривается никаких маневров между двумя такими точками. Конечные пункты перемещения робота устанавливаются просто с помощью механических ограничителей. Устройства данного типа могут эффективно выполнять простые операции, в частности переносить детали с одного конвейера на другой; в этом случае оператор должен задавать только две точки в пространстве, между которыми перемещается схват робота.
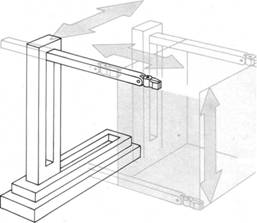
Робот с прямоугольной системой координат. Современные промышленные роботы можно классифицировать в соответствии с характером их зоны действия или рабочей зоны, т. е. трехмерного пространства, в пределах которого они действуют. Как видно из диаграммы, зона действия робота с прямоугольной или декартовой системой координат имеет форму прямоугольного параллелепипеда: горизонтально расположенный манипулятор робота может перемещаться вдоль осей координат х (боковое движение), у (движение внутрь и наружу) и z (вертикальное перемещение). Такие роботы просты в управлении и отличаются высокой точностью действий.

Корпорация «Термвуд» изготавливает роботы Картезиан 5 модели ТС75 с электроприводом, которые представляют собой типичные образцы установок, работающих в прямоугольной системе координат.
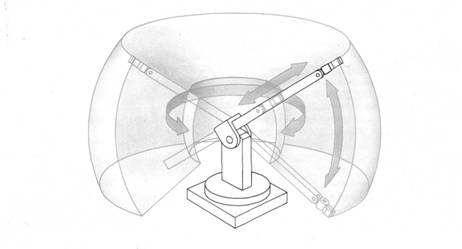
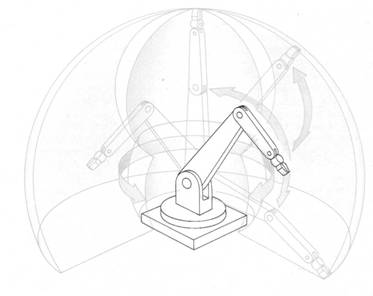
Робот с полярной системой координат. Установка такого типа (называемая также роботом со сферической системой координат), несомненно, во многом напоминает робот с цилиндрической системой координат, однако вертикальное перемещение манипулятора по оси z в данном случае достигается путем его поворота в вертикальной плоскости, а не смещениями вверх или вниз. Таким образом, зона действия подобного робота представляет собой усеченную сферу, а не цилиндр. Первые модели промышленных роботов были сконструированы именно по этому принципу. Они особенно эффективны при выполнении таких операций, как подъем и перемещение грузов, поскольку манипулятор поднимает груз за счет поворота в «плечевом суставе», затрачивая очень небольшую энергию.
Робототехнический комплекс MHU Senior фирмы ASEA, работающий в цилиндрической системе координат; он снимает готовые рукоятки для газонокосилок компании «Флаймо» с автоматического гибочного станка и укладывает их на конвейер, движущийся к участку чистовой обработки.
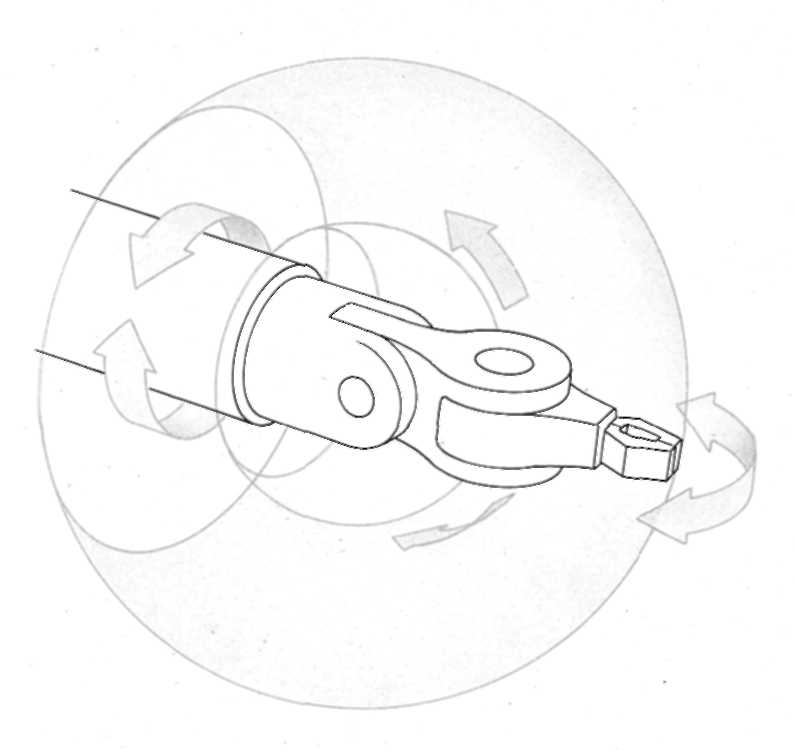
Запястный шарнир. Запястный узел типичного манипулятора функционирует в так называемой вспомогательной системе координат (степеней свободы). Он обеспечивает приведение — отведение рабочего органа (относительно вертикальной оси), сгибание — разгибание (относительно горизонтальной оси), а также вращение (вокруг продольной оси). Кисть робота сгибается — разгибается гораздо свободнее, чем человеческая, поскольку последняя может поворачиваться только на 180°, после чего рука разжимается, выпуская удерживаемый объект. Рабочий орган робота крепится именно к запястному суставу.
Ко второму типу, как уже говорилось, относятся роботы с системой позиционного сервоуправления. Сервомеханизмы позволяют останавливать робот в точках (число которых может быть сколь угодно большим) между двумя заданными пунктами — началом и концом траектории движения. Подобный робот программируется путем записи в его память ряда дискретных точек пространства. Эта операция обычно выполняется с помощью входящего в комплект робота переносного пульта (иногда называемого выносным обучающим блоком), с миниатюрной клавиатуры которого оператор вводит в память соответствующую информацию. Посредством кнопки, задающей направление движения, оператор перемещает манипулятор поочередно вдоль каждой оси, и, когда требуемое положение достигнуто, он нажимает кнопку записи, регистрируя эту точку пространства в памяти компьютера. В дальнейшем робот может автоматически повторять записанную таким образом последовательность движений. Манипуляторы с системой позиционного сервоуправления способны выполнять достаточно сложные процедуры, в частности управлять перемещением сверлильных головок или сварочных пистолетов.
Наиболее совершенными среди устройств трех указанных типов являются роботы с контурной системой сервоуправления. В память их компьютеров заносятся данные временного характера, а не последовательность движений в виде точек по осям координат. Таким образом, оператор может проводить манипулятор робота по всей требуемой траектории перемещения, и в это время в память компьютера заносится каждая точка траектории, так что в дальнейшем робот может повторять ее при выполнении производственных операций. Робот данного типа способен эффективно действовать в тех операциях, при выполнении которых его манипулятор не должен отклоняться от заданного маршрута даже на несколько миллиметров. К таким процедурам относятся окраска распылением и другие виды поверхностной обработки, например покрытие металлических поверхностей антикоррозийными жидкостями.
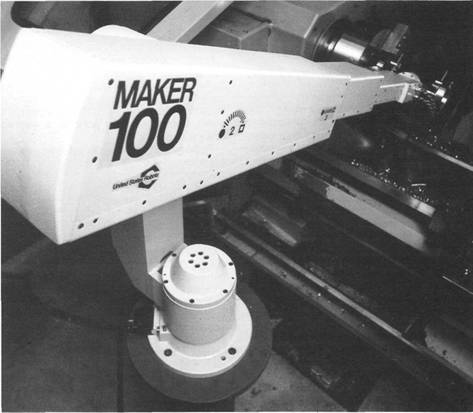
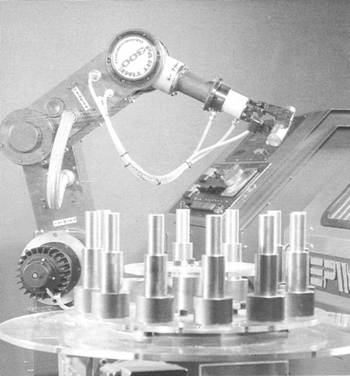
Робот Мейкер 100 фирмы «Юнайтед стейтс роботе» выполняет загрузку и разгрузку токарного станка с числовым программным управлением; кроме того, этот робот, функционирующий в полярной системе координат, подает готовые детали на измерительный стенд, оснащенный воздушными манометрами.
Программирование точных процедур управления работой всех двигателей, приводящих в движение сегменты манипулятора, представляет собой чрезвычайно сложную задачу. Решением ее занимаются программисты фирмы — изготовителя роботов. Большинство современных роботов значительно проще в эксплуатации, чем их предшественники, так как они поставляются уже в комплекте со стандартными программами, записанными в память их компьютеров. Такие программы могут, например, выдать манипулятору команду либо описать дугу в 90° относительно заданной оси, либо переместиться на несколько сантиметров вперед или назад. Оператору в цехе не приходится осложнять себе жизнь составлением программы движений каждого сочленения. Ему достаточно «приказать» роботу, чтобы тот выполнил стандартную программу А, В или С.
Тем не менее, после того как робот покинет конструкторское бюро предприятия-поставщика и займет свое место на заводе, потребуется составить ряд дополнительных программ, чтобы приспособить робот для выполнения необходимых операций. Для этого в память компьютера робота необходимо занести координаты траектории, по которой роботу придется перемещаться при выполнении заданной процедуры. Кроме того, нужно ввести информацию о конкретных действиях робота при его движении по указанной траектории. Например, для сварочного робота понадобится составить прикладную программу, Которая задает моменты включения сварочного электрода, удерживаемого манипулятором. Подъемно-транспортный робот нужно снабдить точной информацией о том, когда он должен поднимать предметы, а когда — опускать. Возможно, также потребуется сообщить роботу, что он должен заменить рабочий инструмент. Все эти данные вводятся в память робота с клавиатуры. После завершения подготовительных операций память робота будет содержать исчерпывающее «меню» инструкций по выполнению конкретных последовательностей действий. С точки зрения технологов, главное достоинство подобного оборудования, разумеется, состоит в том, что один и тот же робот способен функционировать в соответствии с несколькими различными меню. Алгоритм его работы может быть изменен простой модификацией программы. (Правда, может потребоваться и замена некоторых конструктивных компонентов робота, в частности схватов и т. д.)
Робот, запрограммированный таким образом, будет действовать в строгом соответствии с информацией, записанной в его памяти. Он способен решать множество различных задач (их подробное описание приводится в следующей главе). У подобных роботов, однако, имеется один существенный недостаток. Если события во «внешнем мире» происходят не в той последовательности, которая учитывалась программой, то в действиях робота появятся серьезные ошибки. К примеру, программой может предусматриваться, чтобы робот снимал обрабатываемые детали со станка и помещал их на конвейер. Пока процесс изготовления деталей на станке идет без сбоев, робот функционирует надлежащим образом. Ну а если станок выйдет из строя или внезапно заклинит конвейер?
Робот с вращающейся системой координат. Среди роботов-манипуляторов, используемых ныне на промышленных предприятиях, наиболее совершенны те, которые имеют несколько «суставов». Манипулятор такого типа очень напоминает руку человека, поскольку имеет плечевое и локтевое сочленения, а также запястный шарнир. Его зона действия значительно больше, чем у роботов других типов; он способен обходить препятствия гораздо более разнообразными путями и даже может многократно складываться. Самый универсальный среди современных роботов-манипуляторов, он вместе с тем исключительно сложен в управлении, так как, чтобы избежать смещения рабочего органа относительно требуемого положения, движение в локте необходимо компенсировать поворотом в плечевом суставе.
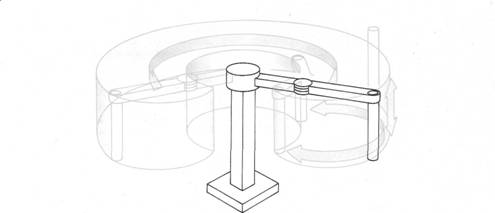
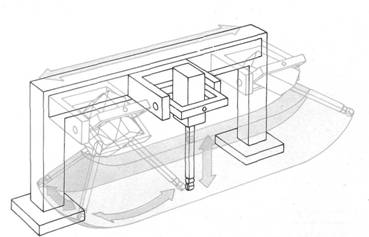
Робот SCARA. Все сочленения и звенья роботов типа SCARA, которые изобрел японский ученый Хироси Макино, расположены в горизонтальной плоскости. Поэтому манипулятор такого робота может вращаться вокруг вертикальной стойки и сворачиваться наподобие складной ширмы. Его зона действия имеет цилиндрическую форму. Роботы типа SCARA отличаются высокими быстродействием и точностью; они особенно полезны в таких требующих большой осторожности сборочных работах, как монтаж миниатюрных электронных компонентов.
Примером робота-манипулятора с шарнирными сочленениями (функционирующего во вращающейся системе координат) может служить система DAROS PT300V фирмы «Дайнити-сикесу»; благодаря большому размаху движений манипулятор особенно эффективен при выполнении таких операций, как дуговая сварка, установка заготовок на станки, а также перемещение заготовок и компонентов.

По утверждению изготовителей, роботы типа Spine по гибкости и дальности действий превосходят все другие подобные системы. На снимке робот окрашивает изнутри кузов автомобиля «Вольво» методом распыления.
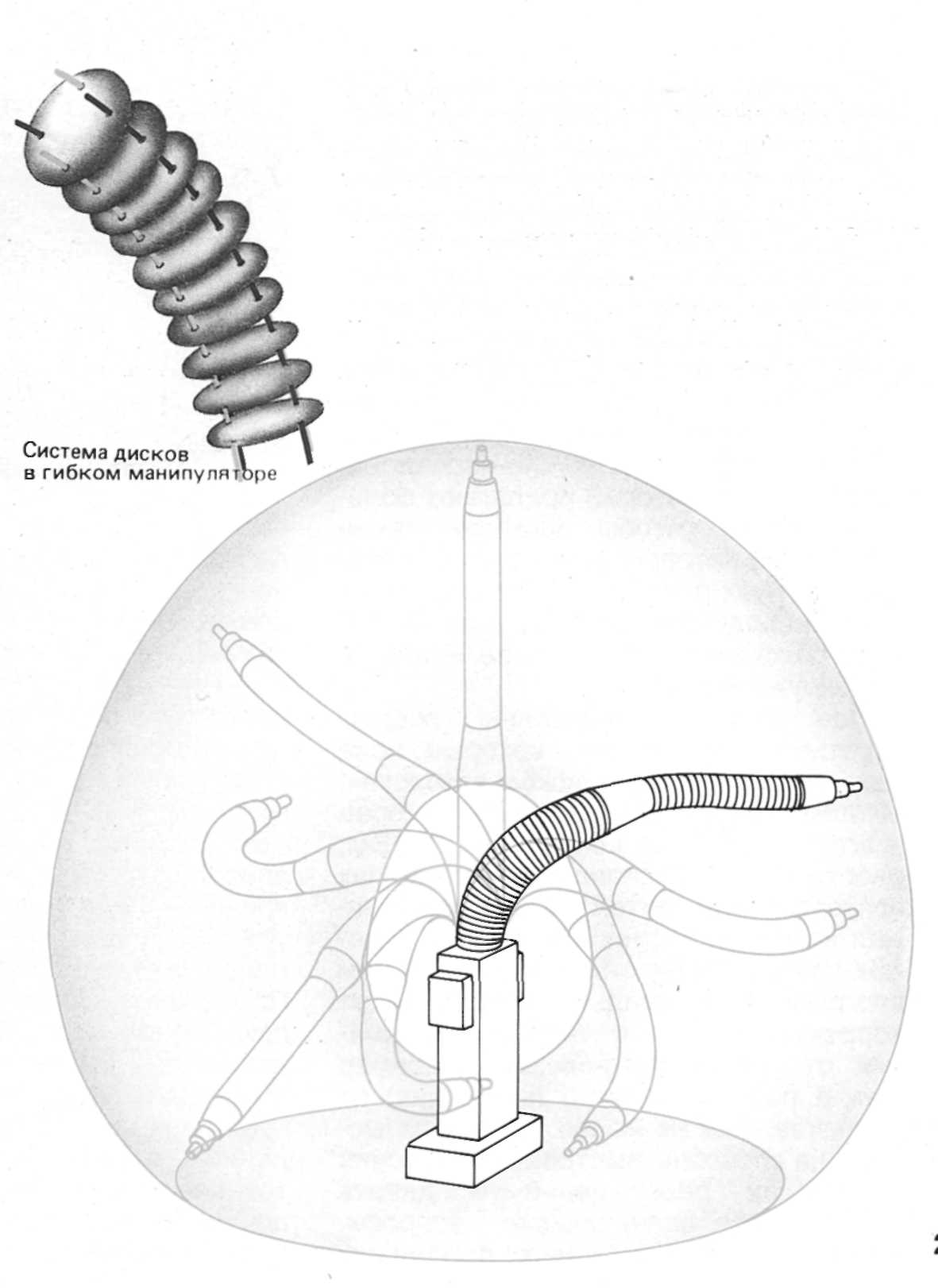
Робот Spine. Эта система оригинальной конструкции состоит из основания и манипулятора, который разделен на нижнюю и верхнюю секции, причем эти секции могут двигаться независимо друг от друга. Такой гибкий манипулятор состоит из множества чечевицеобразных дисков из нержавеющей стали, которые соединены между собой двумя парами тросов, обеспечивающих натяжение. Тросы соединены с поршнями гидравлических цилиндров, которые, создавая натяжение, вызывают перемещения манипулятора. Специальные датчики передают на систему управления информацию о положении манипулятора и его кисти. Обладая значительным радиусом действия и высокой маневренностью, подобный робот способен добираться до таких точек обрабатываемого объекта, которые недоступны обычным установкам; в частности, он может выполнять окраску внутренних частей автомобильного кузова.
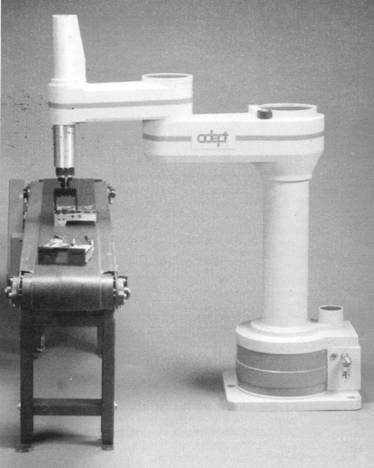
Робот АдептУан фирмы «Адепт текнолоджи» относится к системам типа SCARA; он отличается высокими быстродействием и точностью воспроизведения движений (±0,05 мм).
Робот маятникового типа. Разработав установку IRB 1000, фирма ASEA создала робототехническую сборочную систему принципиально нового типа. Ее манипулятор подвешен подобно маятнику с кардановым подвесом, поэтому такой робот может перемещаться относительно поперечной и продольной осей. Установку IRB 1000 можно также смонтировать на салазках, перемещающихся поступательно по подвесным путям; как видно из диаграммы, зона действия такого робота имеет сложную форму. По словам специалистов фирмы ASEA, эта система движется в 1,5 раза быстрее, чем традиционные манипуляторы (что обеспечивает высокую производительность), а воспроизводимость движений у нее превышает ±0,1 мм.
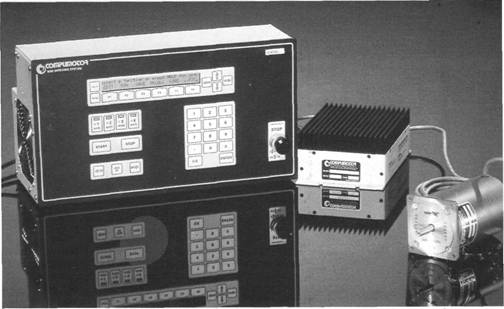
Система управления периодическим движением «Компьюмотор» модели 3000 позволяет оператору подготавливать и записывать в память последовательность элементарных перемещений валов электропривода, состоящего из нескольких микрошаговых двигателей.
В такой ситуации робот должен приостановить работу, иначе при попытке захвата несуществующих деталей возникает опасность его повреждения. В этом заключено несовершенство роботов так называемого «первого поколения».