Нет сомнения, что набор органов чувств робота останется весьма жалким, пока не будет достигнут реальный прогресс в создании систем искусственного (машинного) зрения. (Разумеется, слух во многих отношениях не менее важен, однако слуховые восприятия связаны с решением задач, которые возникают при произнесении и осмыслении фраз на естественном языке; поэтому данной темы мы коснемся в главе, посвященной искусственному интеллекту). Безусловно, преимущества, которые даст роботам разработка действенных средств зрительного восприятия, столь велики, что специалисты по робототехнике ставят решение данной проблемы во главу угла. Причина этого очевидна: до сих пор для людей, работающих на производстве, зрение остается наиболее важным средством восприятия окружающего мира, и возможности совершенствования роботом своего «профессионального мастерства» всецело зависят от его способностей «видеть» происходящее.
Истины ради следует отметить, что уже предлагалось немало систем искус ственного зрения, причем многие из них введены в эксплуатацию и функционируют совместно с промышленными роботами. Однако в действительности ни одно из уже существующих устройств, по-видимому, не может стать основой для создания разносторонних средств визуального восприятия, которыми должен обладать универсальный робот. Это обусловлено тем, что большинство подобных систем разрабатывалось в расчете на решение узкого круга конкретных задач и, хотя такие системы по своей эффективности и точности намного превосходят человеческий глаз, они абсолютно не способны адаптироваться к окружающим условиям, что считается само собой разумеющимся для органов чувств человека. Например, наши глаза позволяют нам одинаково легко определять, как далеко находится тот или иной предмет, насколько прямолинеен край предмета, аппетитно ли выглядит поставленная на стол пища, что чувствуют окружающие нас люди и т. д. Отдельные роботы уже способны делать что-то одно из перечисленного выше лучше нас, но пока мало надежд на то, что в ближайшем будущем они смогут решать две или более из подобных задач.
Типичным примером, иллюстрирующим как эффективность, так и ограниченность этих специализированных систем машинного зрения, можно считать автоматизированную оптическую систему для измерения параметров гребных винтов APOMS (Automated Propeller Optical Measurement System), разработанную по заказу ВМС США. Система APOMS позволяет сравнивать реальную форму лопастей винта с эталоном и выявлять те участки на готовом изделии, где различия с эталоном превышают заданный допуск. Для этого в ней установлен лазерный датчик, в каждый момент времени облучающий элемент поверхности винта и определяющий геометрические параметры лопастей с погрешностью порядка 0,065 мм путем регистрации отраженного света. Самостоятельно вырабатывая порядок сканирования поверхности лопастей, в соответствии с которым манипулятор, управляемый компьютером, перемещает лазерный датчик, такая система, по словам ее разработчиков, на 90% сокращает время визуального осмотра и, кроме того, обладает гораздо большей точностью и надежностью, чем традиционное оборудование. Однако, хотя система APOMS в данном отношении, скорее всего, превосходит человеческий глаз, ее нельзя считать универсальной.
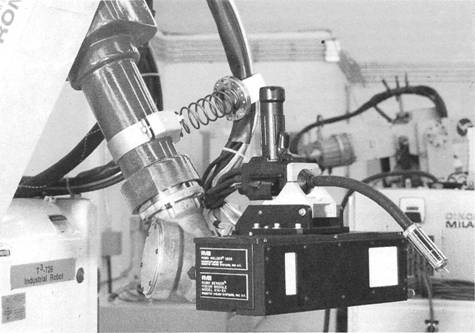
Модуль объемного визуального восприятия «Робот сенсор» модели 210 3-D фирмы «Роботик вижн системз» (RVSI) смонтирован на роботе Т3-726 компании «Цинциннати милакрон». Эта робототехническая система предназначена для дуговой сварки кузовов автомобилей, выпускаемых фирмой «Дженерал моторе». Модуль следит за формированием сварного шва и по ходу сварки измеряет его ширину и глубину.