Недавно были опубликованы предложенные НАСА планы «освоения» Луны с помощью роботов. Этот проект рассматривается как основной этап в расширении деятельности человека в космосе при минимальных начальных затратах. Первый шаг на этом пути — создание серии автоматических вездеходов, которые будут перевозить научные приборы на расстояния до 1900 км в пункты сбора и анализа образцов лунного грунта. Пять вездеходов предполагается оборудовать автоматическими лабораториями для исследования лунного грунта. Кроме того, специалисты намерены установить на вездеходах возвышающиеся телекамеры, с помощью которых операторы на Земле могли бы планировать перемещения аппаратов. Вездеходы должны работать на солнечной энергии, три четверти времени пребывая в движении, а остальное время занимаясь отбором проб. В точке Лагранжа (на обратной стороне Луны) предполагается «подвесить» орбитальную станцию, выполняющую роль ретранслятора информации для вездеходов, работающих на той же стороне Луны. Шестой вездеход (возможно, последний в этой серии) будет «инженером по гражданскому строительству»; он займется перевозкой грунта и выполнением других заданий с целью получения исходных данных, необходимых для подготовки строительных проектов.
На следующем этапе разработок, который достигнет апогея к 2007 г. — пятидесятилетнему юбилею космической эры, — планируется доставить на Луну лабораторию с шестью вездеходами-строителями, которые, используя элементы конструкций космических станций, должны построить лунную базу на двенадцать человек — люди, разумеется, прибудут не сразу. Сначала следует построить автоматизированную фабрику для получения кислорода из лунных минералов (поэтому крайне важен подробный анализ больших участков поверхности Луны). Из ильменита-магнетита, в котором на три молекулы кислорода приходится по одной молекуле железа и титана, эти составляющие можно получить сравнительно в чистом виде. Базальтовые породы, также распространенные на Луне, могут поставлять кислород и кремний. Удобнее всего использовать для этих операций солнечную «печь». Наличие водорода в сколько-нибудь значительных количествах на Луне маловероятно (хотя, согласно некоторым гипотезам, он может быть скован в полярных районах, где температура поверхности обычно низка). Кислород на Луне найдет двойное применение — для дыхания экипажа станции и как компонент ракетного топлива, которое понадобится для отправки космических кораблей на Землю.
Со временем небольшая лунная база может вырасти в оснащенное по последнему слову техники «предприятие», где наивысшие достижения робототехники и искусственного интеллекта будут использоваться для создания «фабрики самовоспроизведения», о которой Джон фон Нейман мечтал еще в конце 40-х годов. На Луне представляется вполне возможным заложить основы механического существа, «питающегося» за счет ресурсов этого безжизненного естественного спутника Земли и производящего копии самого себя; последние в свою очередь также будут создавать себе подобных. При соответствующих инструкциях такой роботизированный комплекс со временем смог бы изготавливать специализированные роботы для «экспорта» на околоземную орбиту, где они использовались бы на сборке спутников из добытых на Луне материалов, работающих на солнечной энергии, или кораблей-роботов, предназначенных для исследования других планет.
Применение роботов для изучения и использования ресурсов Солнечной системы, а затем и всей Галактики давно уже стало популярной темой научной фантастики. Однако ученые начали серьезно задумываться над этим вопросом лишь в последние годы Наиболее крупное исследование по этой теме было проведено летом 1980 г под эгидой НАСА и Американского общества технического образования е университете г. Санта-Клара (шт. Калифорния). Этому исследованию предшествовал серьезный анализ, проведенный Георгом фон Тизенхаузеном и Уэсли Дарбро, которые изложили свои выводы в сообщении под названием «Самовоспроизводящиеся системы — системотехнический подход». Они разработали проект лунного самовоспроизводящегося комплекса (ЛСВК) — некой «машины новогодних подарков», бесплатно поставляющей любые товары массового спроса.
ЛСВК на два порядка совершеннее самовоспроизводящейся машины Неймана, которая, по его замыслу, должна «плавать в море запасных частей», беря наугад одну деталь за другой, пока не попадется необходимая для очередного этапа сборки, после чего машина начинает подыскивать следующий компонент. ЛСВК получает свои части из хорошо организованного производственного запаса, который изготавливается из лунного сырья. По мере своего роста ЛСВК, словно живой организм, создает себе подобных, которые будут продолжать самовоспроизведение, пока не заселят всю Луну или не будут направлены на другие планеты.
Что касается ближайших перспектив, то Тизенхаузен и Дарбро предложили провести эксперимент по самовоспроизведению роботов, в ходе которого уже собранный и запрограммированный робот станет собирать другого из деталей готового набора. Робот 1 собирал бы робот 2 — от схемных плат до манипуляторов. Наконец, на последнем этапе робот 1 вставлял бы «пустой» диск в свой компьютер, переписывал на диск заложенную в нем программу, помещал бы копию своей программы в память робота 2 и запускал его компьютер. По мнению специалистов, без последней операции невозможно «доказать, что роботы каждого следующего поколения совершенно независимы от предыдущего», а не просто следуют командам, переданным через общий энергетический или информационный канал.
$IMAGE2$
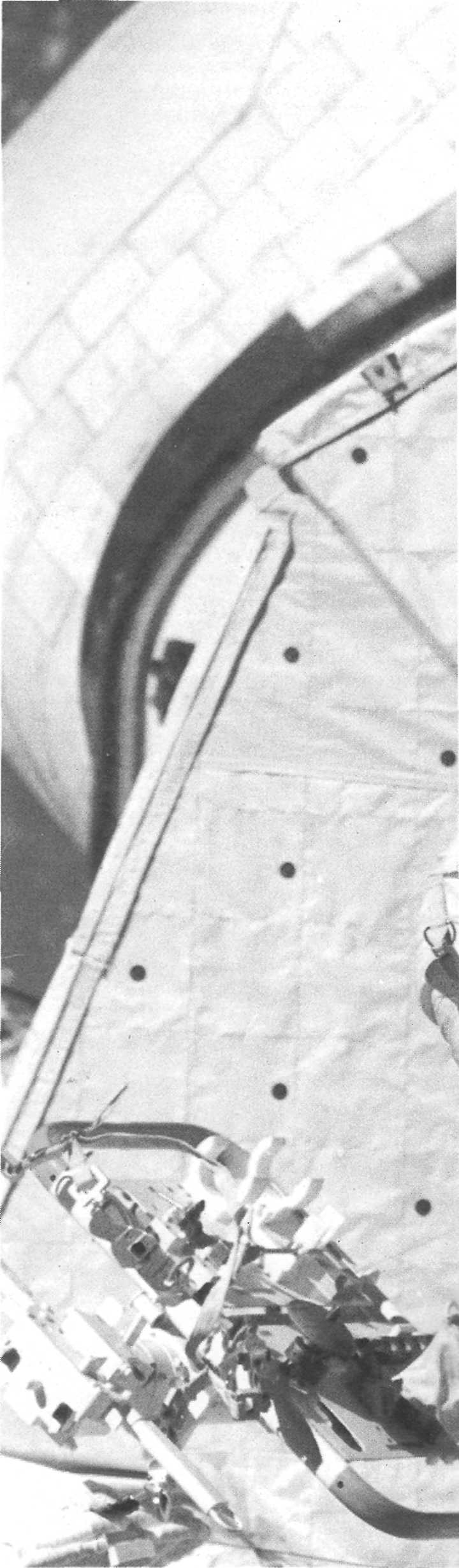
Эксперимент по техническому обслуживанию спутников на орбите проводился во время полета «Шаттла» 41В; закрепив ногу фиксатором, Брюс Маккендлесс работает специальным инструментом. В следующих полетах эту работу будет, вероятно, выполнять робот-манипулятор.
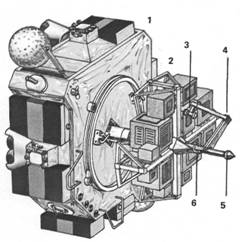
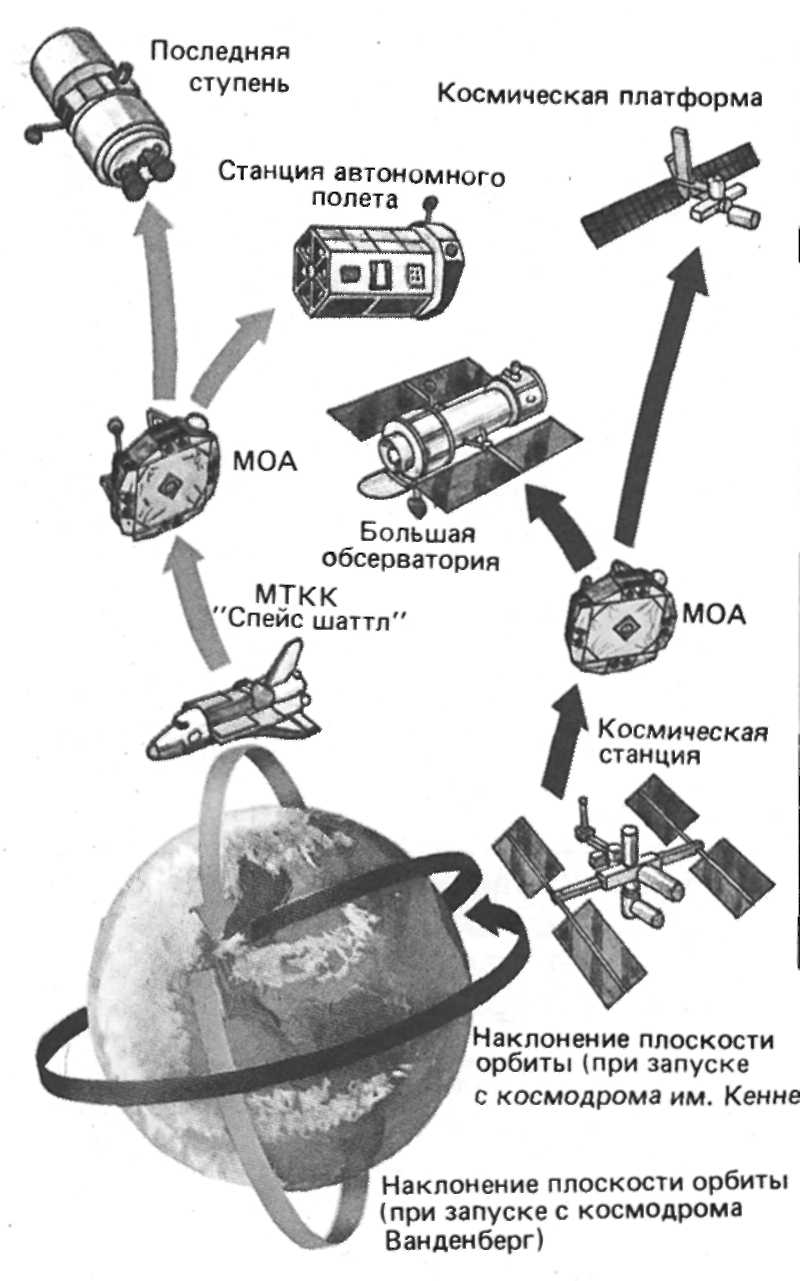
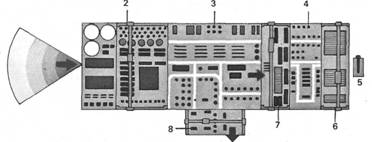
Составные части МОА и КООС: 1 — маневрирующий орбитальный аппарат (МОА); 2 — комплексная орбитальная обслуживающая система (КООС); 3 — рабочий орган; 4 — привод локтевого шарнира; 5 — датчик стыковки; 6 — привод плеча, МОА вместе с обслуживающим модулем, снабженным одним манипулятором. Это устройство предназначено для проведения текущего технического обслуживания космических аппаратов, включая замену узлов и дозаправку топливом. МОА представляет собой многократно используемый космический аппарат автономного полета, который после запуска с МТКК «Спейс шаттл» или космической станции дистанционно управляется с Земли, На диаграмме показаны различные объекты, которые могут обслуживаться МОА. Первый полет такого аппарата намечен на 1990 г.
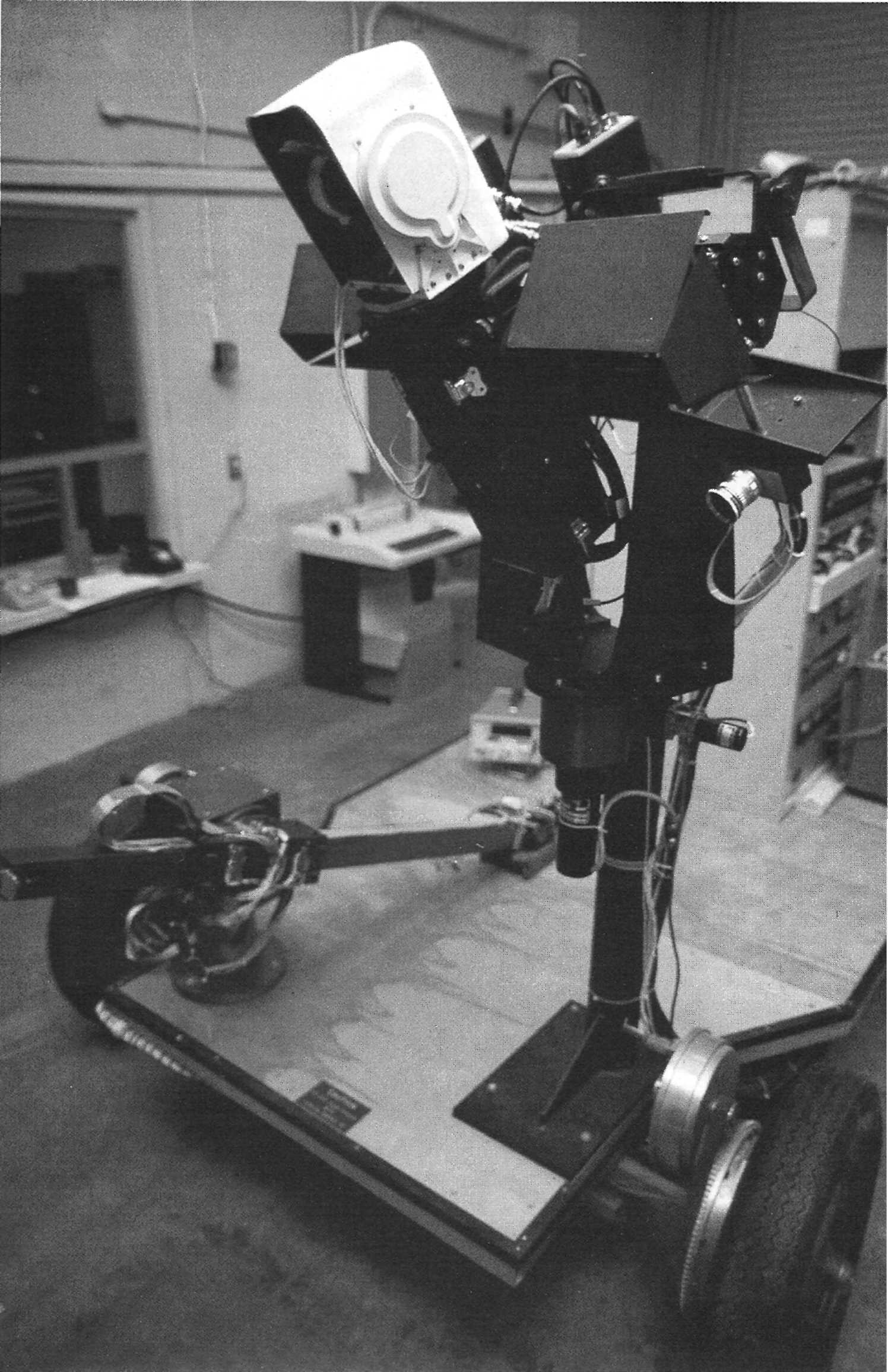
Этот аппарат создан в Лаборатории реактивного движения НАСА и предназначен для исследования проблем, связанных с проектированием марсианского вездехода.
Далее робот 2 соберет робот 3, продемонстрировав тем самым, что он действительно является точной копией робота 1; эта операция называется «проверкой на плодовитость». Всего предполагается собрать таким образом семь роботов, которые затем начнут изготавливать различные изделия. В конце эксперимента роботы сами себя разберут. Со стороны все это может показаться не столь уж сложным, но на самом деле для такого эксперимента необходимы средства, на порядок превосходящие современный уровень робототехники. Например, чтобы надеть шайбу на болт, требуется восемь отдельных операций. Робот ПУМА 500, который служил основным техническим средством этого эксперимента, управлялся компьютером LSI-11, в памяти которого могут храниться данные о почти тысяче операций; ПУМА 500 состоит из 1500 компонентов. По расчетам ученых, потребуется почти пять лет, чтобы создать компьютер объемом не более 1 м3, который сможет хранить достаточное количество команд для самовоспроизводства робота ПУМА 500.
Необходим большой скачок от подобного эксперимента в лабораторных масштабах (который, несмотря на его невероятную сложность, наверное, сравним с цирковым трюком) до создания действующего «зародыша» ЛСВК массой 100 т. Для построения ЛСВК с наиболее совершенной конфигурацией кроме манипуляторов, колесных транспортных средств и компактных источников энергоснабжения новейших типов понадобится высокоорганизованная система управления и контроля, а также система памяти огромного объема для хранения полного технического описания зародыша. Согласно оценке, для описания зародыша и программы воспроизведения необходимо примерно 1013 бит информации, что почти на два порядка превышает количество информации, заложенной в генетическом коде одной клетки тела человека, и лишь на два порядка меньше объема информации, содержащейся в человеческом мозге.
На третьей стадии функционирования ЛСВК роботы будут получать «полуфабрикаты», с помощью которых строятся компоненты роботов-дубликатов и других изделий. На четвертой стадии предусматривается превращение сырья в промышленные запасы. Это наиболее сложный этап, поскольку здесь придется широко использовать химико-технологические процессы и продемонстрировать способность приспосабливаться к изменениям в составе сырья.
Только после этого закладывается возможность для создания зародыша ЛСВК. По расчетам специалистов, целесообразная масса зародыша составляет 100 т; она определена исходя из полезной нагрузки, которую может нести американская ракета-носитель «Сатурн V» (за один рейс она способна доставить на Луну 25 т груза), и оценки существующих и прогнозируемых возможностей промышленности.
Сотрудник Лаборатории реактивного движения Боб Каннингем перед самоходной исследовательской установкой, в набор чувствительных устройств которой входят две телекамеры и лазерный дальномер.
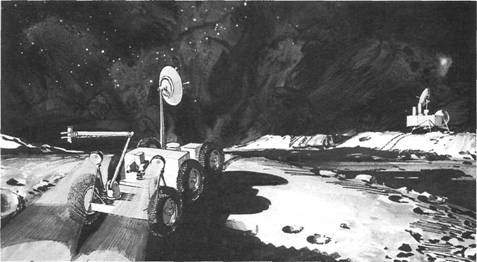
Планетоходы будут представлять собой гибридные средства передвижения — частично управляемые людьми с Земли, а частично автономные. Здесь изображен «Марсоход», сконструированный в Лаборатории реактивного движения.
Осуществление описанной программы начнется с подробного картографирования лунной поверхности — с целью выбора наиболее подходящего места для установки зародыша. После автоматической посадки роботы выйдут на Луну и возведут «солнечный купол» для получения электроэнергии и отчасти для защиты «зародыша». Затем те же роботы приступят к тщательному исследованию района и на основе добытых таким путем сведений сделают окончательный выбор места для ЛСВК. Движущиеся роботы установят три импульсных радиоответчика, которые должны обеспечить безопасную и точную навигацию подвижных механизмов в районе строящегося ЛСВК. Роботы-шахтеры и роботы-дорожники разровняют и укрепят поверхность в центре строительной площадки для возведения платформы диаметром 120 метров. На ней, словно станки на заводе, будут размещены различные компоненты «зародыша». Когда платформа достигнет достаточно больших размеров, роботы перенесут главный компьютер в вырытую под ней нишу, защитив его таким образом от воздействия солнечных и космических лучей, а также метеоритов. В заключение роботы смонтируют весь солнечный купол, и ЛСВК — через год после доставки «зародыша» на Луну — будет готов к пуску.
ЛСВК будет иметь восемь основных секторов: центральный пункт управления, химическое производство (где лунный грунт перерабатывается в полуфабрикаты), технологическую линию (на которой из полуфабрикатов изготавливаются компоненты робота), участок сборки (там из компонентов монтируются роботы), роботизированную систему добычи полезных ископаемых, строительный комплекс (в рамках которого роботы-строители будут возводить платформу под зародыш и прокладывать дороги для роботов-шахтеров) и сеть импульсных радиоответчиков. ЛСВК будет разбит на две одинаковые части, в каждой из которых имеется сектор химического производства, технологическая линия и склад, расположенные по радиусам от центра платформы. Добычу ископаемых на Луне предполагается вести рядом с указанными секторами, что будет содействовать их росту, причем отходы и шлак должны сгребаться в насыпь, обеспечивая тем самым расширение платформы (см. приведенную диаграмму).
На первом этапе перед ЛСВК будет поставлена задача создать свой дубликат, чтобы случайная катастрофа не свела на нет огромные затраты, связанные с изготовлением оригинала. Достаточно построить копию — и число таких предприятий начнет расти экспоненциально.
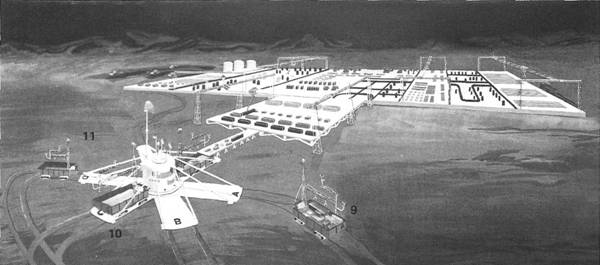
Лунный самовоспроизводящийся комплекс: 1 —добыча полезных ископаемых; 2 — получение материалов и изготовление полуфабрикатов; 3 — изготовление компонентов; 4 — производственное отделение; 5 — отделение готовых изделий; 6 — складирование продукции; 7 — хранение компонентов (для изготовления продукции); 8 — хранение компонентов (для самовоспроизводства).
В 1980 г. два научных сотрудника НАСА Георг фон Тизенхаузен и Уэсли Дарбро представили проект лунного комплекса, который мог бы воспроизводить самого себя, одновременно выпуская множество полезных изделий. «Размножившись» со временем, идентичные производственные комплексы, используя сырье, добываемое с поверхности Луны, могли бы в короткий срок «индустриализовать» наш естественный спутник. Основным элементом проекта является универсальный строительный агрегат (УСА), способный построить любую систему, в том числе и себе подобную. Агрегат состоит из двух элементов: серии мобильных универсальных строительных машин (9) и стационарного универсального строительного центра (10), которые управляются главной системой (11). Получая в результате автоматизированной добычи полезных ископаемых и производства изделий все необходимые материалы, УСА создает элементы для строительства новых самовоспроизводящихся комплексов. Продукция, которая подлежит доставке на Землю, хранится в отделении готовых изделий.