С наступлением эпохи космических станций мы, вероятно, станем свидетелями новых достижений в области космической робототехники. На борту самой космической станции наличие робота представляется обязательным. Каким же он должен быть? Именно над этим вопросом работают сейчас американские фирмы, участвующие в так называемой фазе В (этап уточненных описаний) исследований, цель которых — сравнение различных конструктивных вариантов космической станции. В технических требованиях к предлагаемым проектам НАСА указало, что манипуляционная система космической станции «по своему радиусу действия и характеру выполняемых операций должна быть сравнима» с системой ДУМС «Шаттла».
«Манипулятор должен монтироваться на подвижной платформе, обеспечивающей возможность его поступательного перемещения к любым важнейшим узлам космической станции как на этапе ее сборки, так и в процессе эксплуатации». Платформа должна обеспечивать автономное (т. е. без питания от бортового источника станции) перемещение манипулятора и выполнение им требуемых операций в течение максимум 6 ч, а при подключении к бортовому источнику питания манипулятор должен быть способен функционировать сколь угодно долго. Планируется проведение исследований для оценки методов управления таким манипулятором как с борта «Шаттла» во время сборки станции, так и астронавтами, находящимися на рабочих постах, состыкованных с манипулятором. На предварительном чертеже робот-манипулятор изображается стоящим на платформе, которая, подобно самодвижущейся тележке, катается по основным конструкциям станции. В другом варианте предполагается оснастить манипулятор рабочими органами, укрепив их на каждом его конце, что позволит перемещать манипулятор по станции примерно так же, как штурман, измеряя расстояния, переставляет циркуль по карте.
Разрабатывается еще один космический робот — маневрирующий орбитальный аппарат (МОА), который прежде называли маневрирующей системой с дистанционным управлением. При проектировании МОА предусматривается, что этот робот, действительно действующий на космической станции, будет управляться с борта «Шаттла». Первоначально МОА предполагается использовать для вывода спутников на более высокие орбиты, чем это можно сделать с борта «Шаттла», возвращая их затем на борт последнего; кроме того, робот будет снимать спутники с орбиты и помещать их в грузовой отсек «Шаттла». Уильям Хьюбер, руководитель проекта в Центре космических полетов им. Маршалла (НАСА), считает это действительно важной функцией космического робота, к сожалению пока не реализованной. Это позволило бы производить профилактический ремонт спутников, просто доставляя их на космическую станцию, где хранятся необходимые запасные части и инструмент. В качестве одной из основных задач программы разработки и развертывания роботизированной космической станции уже предусмотрено обслуживание действующих научных спутников, таких, как «Космический телескоп Хаббла» и «Обсерватория для исследования источников гамма-излучения».
Однако, по мнению специалистов, дело не ограничится просто созданием беспилотного орбитального модуля многократного использования. «Когда по мере осуществления нашей программы мы вступим в фазу В разработки космической станции, все это послужит основой для создания вспомогательных полетных комплектов», — сказал Хьюбер. Три таких комплекта в настоящее время уже исследуются; они предназначены для обслуживания, дозаправки и снятия с орбиты спутников, потерявших устойчивость. Что касается обслуживания, то, как отмечал Хьюбер, «подход заключался в разработке автоматизированной системы для замены модулей при отказе от большого числа рабочих органов, клещевых захватов и т. п. ... Проблема заключается в ориентации [разрабатываемой системы] на обслуживание. Первым потенциальным «клиентом» является космическая платформа. Большинство КА будет гораздо проще обслуживать, возвращая их на станцию, поскольку обслуживать на месте выгодно лишь крупные КА или большие группы аппаратов». Но, несмотря на многообещающие планы, пока не предложено практически ничего нового по сравнению с рассмотренными здесь основополагающими подходами. По словам Хьюбера, «в действительности нужен полетный комплект», т. е. конкретный набор инструментов и вспомогательных средств, но разработка его связана со многими трудностями: проблемами стыковки с КА, размещения отдельных модулей и т. д. Наконец, как сконструировать спутник, который мог бы выполнять свою исследовательскую задачу и во время стыковки с маневрирующим орбитальным объектом?
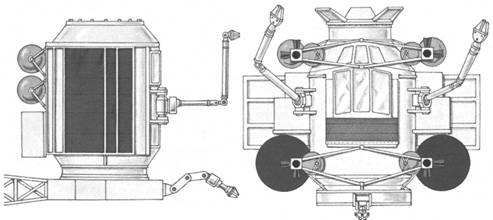
Перспективная ремонтная платформа. Отделяемая пилотируемая станция с дистанционно управляемым манипулятором, проектируемая фирмой «Грумман». Она представляет собой вариант открытой конструкции типа так называемого «сборщика вишен»; оператор, работающий на этой платформе, может находиться в обычной одежде. Этот отделяемый от основного космического аппарата модуль будет оснащен индикаторами и средствами для управления механическими манипуляторами, предназначенными для сборочных работ и технического обслуживания. На рисунке модуль закреплен на космическом кране типа ДУМС.
Станция автономного полета. Естественным продолжением ремонтной станции фирмы «Грумман» должен стать отделяемый модуль автономного полета, который значительно расширит возможности астронавта по сборке крупногабаритных конструкций на орбите. Модуль будет снабжен двумя «поясами» маневровых двигателей и резервуарами для ракетного топлива, что обеспечит ему необходимую мобильность; кроме того, он будет оснащен двумя дистанционно управляемыми манипуляторами.
Над такого рода полетным комплектом работала фирма «Мартин Мариетта аэроспейс» по заказу исследовательского центра НАСА в Лэнгли — речь идет о перспективном спутнике с дистанционным управлением для обслуживания объектов на орбите (ДУСОО). «Нынешний уровень развития техники не позволит как сейчас, так и в обозримом будущем разработать полностью автономную роботизированную систему для решения разнообразных задач, которые могут возникнуть в полете, особенно если дело касается незапланированных или непредвиденных событий, — отмечалось в отчете об этом исследовании. — Однако, сохранив человека-оператора в качестве одного из звеньев контура управления, можно создать дистанционно управляемую систему и на основе сегодняшней техники. Если в работе такой системы участвует человек с его гибким мышлением и способностью ориентироваться в неожиданных ситуациях, то ее возможности по выполнению операций в космосе значительно расширятся».
Ключевым моментом в данном исследовании был вопрос о применении уже существующих устройств и конструкторских решений, так что проект ДУСОО в значительной мере опирался на прежние разработки, а именно на комплексную орбитальную обслуживающую систему (КООС) и манипулятор для экспериментальных полетов (ЭПМ), которые были созданы по заказу Центра космических полетов им. Маршалла (о них будет рассказано ниже). Проектируемый спутник (массой 384 кг) будет вводиться в состав МОА со стороны его лицевой части. Спутник будет иметь крестообразную структуру, в которой укрепляются модули замены, а чуть выше его центральной части расположатся два робота-манипулятора и стереоскопическая телекамера, т. е. получится некое подобие человеческих рук и головы. По оценкам фирмы «Мартин Мариетта», разработка ДУСОО займет приблизительно три года и обойдется в 40 млн. долл. (по данным на 1982 г.). С помощью «Шаттла», возможно, будут проводиться полетные испытания экспериментальных моделей такого спутника, которые в дальнейшем предполагается ввести в состав МОА с целью дополнительных проверок и доработок.
В ходе осуществления этой программы общая структура и внешний вид МОА и ДУСОО, а также принципы их эксплуатации исследуются с помощью трех имитаторов космических объектов; они установлены в Центре им. Маршалла с целью выработки технических решений, необходимых для обеспечения «дистанционного присутствия», т. е. дистанционного пилотирования.
Манипулятором ДУМС управляет астронавт, находящийся в пилотском отсеке «Шаттла». Справа видны органы управления поступательным и вращательным движением манипулятора (соответственно вверху и внизу).

Самый богатый опыт использования принципов дистанционного присутствия накоплен в атомной промышленности, где приходится манипулировать материалами, находящимися в так называемых «горячих камерах». Однако в этом случае объекты прочно «стоят на земле», точнее, на стационарной опорной конструкции, и управление ими не связано с временными задержками. В космосе же командные сигналы и информация, передаваемые через спутники связи, могут запаздывать на значительное время — до 2 с; кроме того, космические аппараты свободно «плавают» в космическом пространстве, поэтому не исключено, что обслуживающий аппарат, «вслепую» блуждая в космосе, может повредить спутники.
Именно в этом отношении имитаторы, установленные в Центре им. Маршалла, должны оказать неоценимую помощь. Предполагается, что они позволят инженерам и «пилотам» МОА имитировать движения КА начиная с последнего этапа сближения и кончая моментом стыковки, сопровождающейся обычно интенсивными толчками и вибрацией. Для решения этой задачи требуются три системы имитации: имитатор движения цели, так называемая «плоская платформа» и стыковочный стол с шестью степенями свободы. Функции таких систем имитации в определенной степени дублируют друг друга, однако это повышает надежность операции.
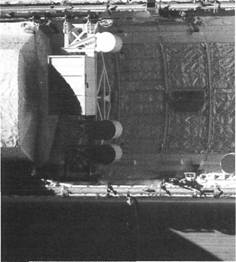
ДУМС, развернутая во время полета «Шаттла» STS-7 в июне 1983 г. Изображение манипулятора, зафиксированного в вертикальном положении над грузовым отсеком «Шаттла», получено с помощью телекамеры, размещенной на борту автономной платформы СПАС.
Имитатор движения цели позволяет копировать последнюю стадию сближения с целевым объектом, начиная примерно с расстояния 16 км до самой стыковки. В помещении, стены которого окрашены в однородный черный цвет, находится модель МОА — телекамера, установленная в кардановом подвесе, и целевой КА «Ландсат-4», размещенный на несущем шасси, обеспечивающем вращение относительно трех осей и поступательное перемещение по рельсовому пути длиной 6 м. Модель целевого объекта покрыта фосфоресцирующей краской, а помещение «освещено» ультрафиолетовым излучением; в результате на экране видеомонитора модель видна столь же отчетливо, как и настоящий орбитальный объект при полном солнечном освещении.
Пилот МОА сидит за пультом управления, который предстоит модернизировать, поскольку он разработан еще в 70-х годах. Перед глазами пилота находятся один телевизионный экран и ряд информационных дисплеев, а также два ручных органа управления — один (справа) для вращательного и другой (слева) для поступательного перемещений.

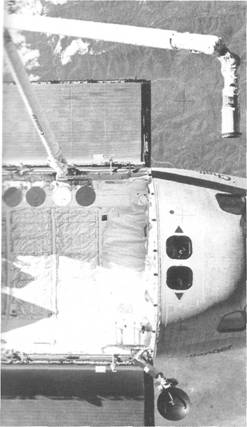
Астронавт Джон Фабиан рядом с захватным устройством манипулятора ДУМС, установленным на платформе СПАС-01. Видны отметка цели и стыковочный штифт, вокруг которого расположены три направляющих конуса.
Между этими двумя моделями расположен компьютер SEL 3255 (в ближайшее время он будет заменен на мини-ЭВМ VAX 11/750), который рассчитывает относительное положение и взаимное перемещение обоих КА, а также преобразует полученные данные в необходимые перемещения телекамеры и модели целевого КА. Например, когда МОА начинает маневр сближения с целевым КА, модель последнего действительно скользит по рельсам навстречу камере. При моделировании это различие не играет роли, поскольку оператор наблюдает на экране видеомонитора абсолютно то же самое.
Управление полетом компьютер производит с учетом законов орбитального движения. Если МОА приближается к цели слишком быстро, то он оказывается над ней, поскольку вследствие увеличенной скорости выходит на более высокую орбиту. Решить эту проблему можно, нацелив МОА несколько ниже целевого КА. Главная цель имитации такого полета — эффективная подготовка операторов МОА. Приведу пример того, сколь полезна для квалификации оператора работа с имитатором: я «сжег» 19 кг ракетного топлива, направляя МОА к модели «Ландсата», и все же на 60 см промахнулся мимо цели, в то время как опытный оператор попадает точно в стыковочный узел, затратив всего 3,3 кг топлива.
Перемещения в непосредственной близости от целевого КА имитируются с помощью «плоской платформы»: модель МОА плавает на воздушных подушках над обширным «полом», напоминающим гладкую водную поверхность. Площадь «пола» 13,4x26,2 м; он изготовлен из эпоксидной смолы, которая покрывает бетонное основание довольно большой глубины (3,6 м). Благодаря такой конструкции платформа отличается высокими устойчивостью и гладкостью — неровности составляют не более 0,138 мм на квадратный метр поверхности. Столь высокая чистота обработки была необходима, поскольку любые неровности здесь вырастали бы в настоящие горы и долины, которые могли бы сбить с заданного маршрута моделируемый КА.
Модель КА представляет собой агрегат массой 1000 кг, который выглядит как чудовищное сплетение труб и вентилей. Он снабжен шестью большими баллонами со сжатым воздухом для питания воздушных подушек, на которых движется КА, а также 24 маневровыми двигателями, оглушающее грохочущими при перемещении агрегата по поверхности плоской платформы. В составе модели КА имеется специальное приспособление типа вилочного погрузчика, на котором можно размещать до 181 кг полезного груза. Хотя такой агрегат ориентирован главным образом на программу создания МОА, его структура, как поясняет руководитель эксперимента Фред Роу, отличается самым общим характером, что позволяет реализовать на ее основе космические аппараты различных конструкций, в том числе маневрирующий пилотируемый аппарат (МПА) с астронавтом на борту.