Таким образом, совершенно недостаточно, чтобы роботы воспринимали окружающую действительность лишь как пассивные наблюдатели. Не менее важно, чтобы «органы чувств» обеспечивали «обратную связь»; иными словами, с помощью этих органов роботы должны обрести возможность «осознавать», каким образом их действия отражаются на состоянии внешнего мира. (В данном случае под «миром», естественно, понимается лишь та ничтожно малая его часть, с которой взаимодействует робот.)
Поскольку концепция обратной связи играет ключевую роль для любой автономной или самоуправляемой системы, например робота, необходимо четко понимать ее суть. Основная идея здесь заключается в том, что функция управляющего органа (мозга животного или компьютера робота) должна состоять не только в формировании и передаче инструкций (в виде нервных импульсов, поступающих на мышцы, или электрических сигналов, идущих к электродвигателю), но и в восприятии и интерпретации тех данных, по которым можно судить о выполнении этих инструкций и о характере их воздействия на объект управления.
Реальна ли возможность использовать роботы для стрижки австралийских овец? В настоящее время исследуются системы с упреждающим принципом действия, которые планируют траекторию движения ножниц и «прощупывают» кожу под еще не остриженной шерстью.
Предположим, например, что шофер задним ходом подает грузовик в узкий боковой проезд, руководствуясь указаниями своего помощника, который находится позади машины. Шофер управляет грузовиком (т. е. фактически выдает инструкции его механизмам), поворачивая руль или нажимая в нужные моменты на акселератор и тормоза. А команды, подаваемые помощником, «так держать», «чуть левее», «руль прямо», представляют собой не что иное, как сигналы обратной связи, поскольку помощник имеет возможность наблюдать, приводят ли действия шофера к необходимому результату. Здесь мы имеем дело с так называемой упреждающей информацией, которая содержит сведения не о том, что уже произошло, а «прогноз на будущее»; например, если помощник кричит: «Стоп!», заметив угрозу столкновения с фонарным столбом, то тем самым он предупреждает шофера о возможной аварии.
Таким образом, точность и действенность управления достигаются благодаря тому, что информация как бы курсирует по замкнутому контуру: выдаются команды на выполнение определенных действий, а затем — по обратной связи, представляющей собой вторую часть контура, — поступают данные о результатах этих действий. Если говорить о нас, людях, то в основном, когда мы делаем что-то руками, в действии находятся два «контура». Внешняя часть обоих контуров, по которой передаются команды, образована группой нервов (эфферентной системой), осуществляющих передачу сигналов от мозга к мышцам. Данные обратной связи поступают из двух независимых источников. Во-первых, передается информация о положении частей тела, которая формируется посредством так называемой проприорецепции и поступает в мозг через другую группу нервов — афферентную систему, следящую за положением, т. е. степенью напряжения или расслабления мышц руки и кисти. Во-вторых, источником информации служат наши глаза, следящие как за движением пальцев рук, так и за положением предмета, которым мы манипулируем.
Степень нашей зависимости от обоих названных видов обратной связи можно наглядно проиллюстрировать на двух простых примерах. Если человек будет долго вертеться, то у него закружится голова, он начнет пошатываться и может даже упасть. Причина этого вполне очевидна. Вращательное движение приводит к временному нарушению работы вестибулярного аппарата, который образует проприорецептивную обратную связь, необходимую нам для сохранения равновесия. В рассматриваемом случае человек начинает пошатываться и, возможно, падает вследствие того, что мозг уже не в состоянии определить, что следует делать для поддержания устойчивого, вертикального, положения тела. Подобные неудобства, вызванные отсутствием визуальной обратной связи, мы испытываем, встав среди ночи в незнакомом помещении и пытаясь найти выключатель.
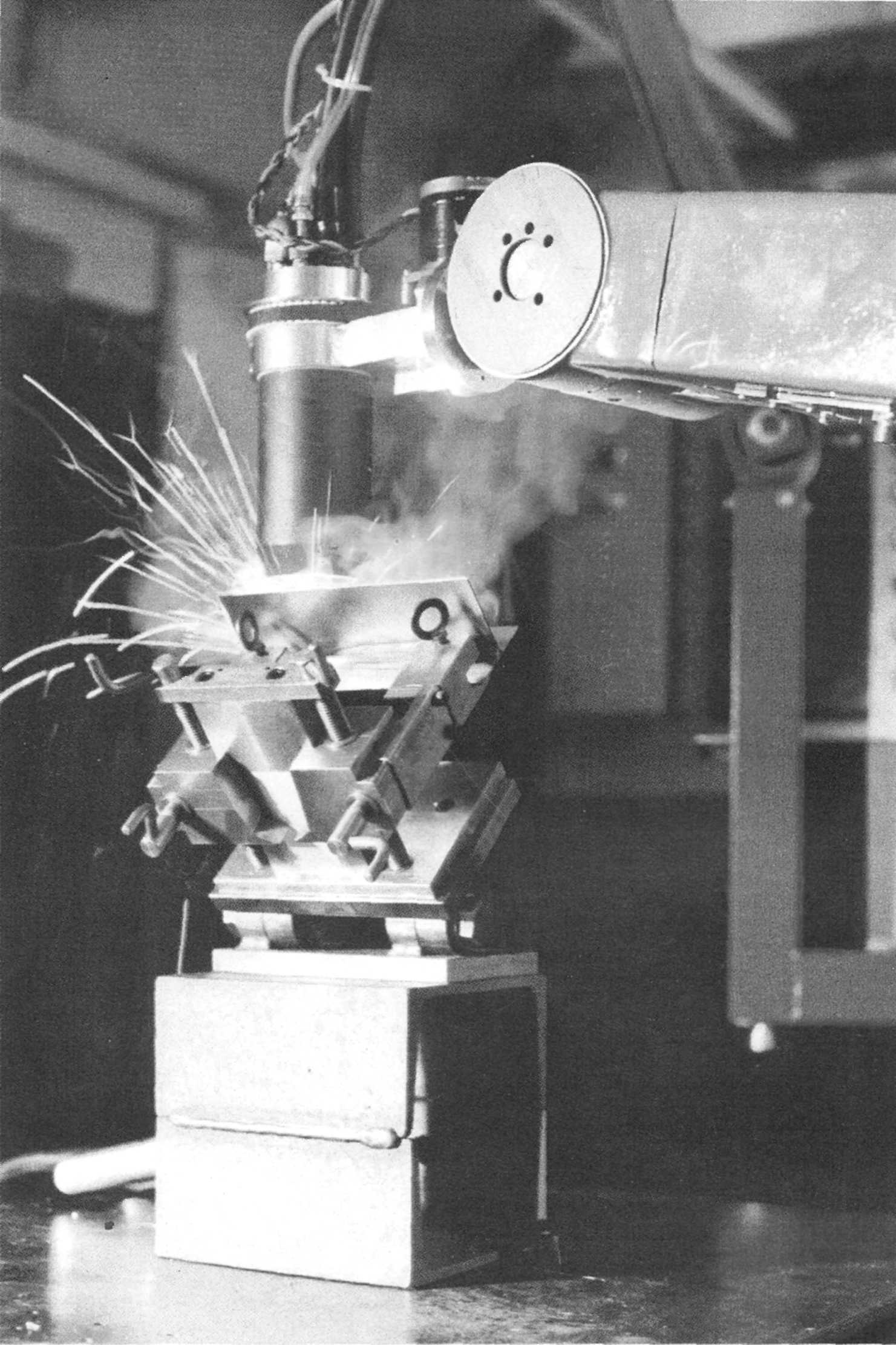
Ученые из Оксфорда разработали установку дуговой сварки, управляемую датчиками. Получить неразрывный шов путем дуговой сварки можно только при наличии датчиков обратной связи.
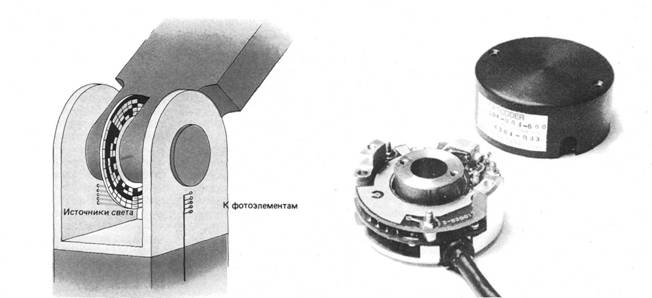
Стандартный оптический преобразователь угол—код (Sumtak LDA), используемый для контроля положения звеньев робота-манипулятора и формирования сигналов обратной связи, которые необходимы для точного управления последним.
Преобразователь угла в цифровой код (внизу слева). Последовательность прозрачных и непрозрачных ячеек на кольцах, образующих кодовый диск, «считывается» фотоэлементами. В результате формируется двоичный код (непрозрачная ячейка — 1; прозрачная — 0), который отображает текущее положение вращающегося вала и поступает в виде сигналов обратной связи на компьютер, управляющий роботом. Чем больше колец в диске (соответственно чем больше количество «кодовых» битов в сообщении), тем выше результирующая точность определения положения. Для наглядности преобразователь угол—код показан как единое целое с шарниром робота; в действительности он представляет собой автономное устройство (см. фото), которое, как правило, монтируется на одном из концов вала или с наружной стороны двигателя.
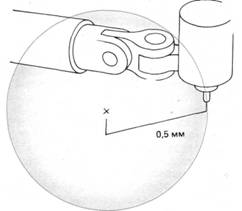
Разрешающая способность и воспроизводимость. Очень существенна точность (или разрешение), с какой робот может определять положение своего рабочего органа. Так, бессмысленно подавать на станок команду, по которой он должен высверливать отверстие с отклонением не более 0.25 мм от заданного положения, если разрешающая способность робота всего лишь 0,5 мм. Не менее важно, с какой точностью робот может повторить перемещение (или последовательность положений), предварительно зарегистрированное в его памяти.
Большинство современных роботов обладает лишь проприорецептивной системой обратной связи, которая дает информацию о положении звеньев «рук» и «кистей» в шарнирах (а в ряде случаев и о силах, прикладываемых к этим звеньям). Проприорецептивные органы чувств имеют исключительно важное значение для любых роботов, кроме простейших (называемых иногда загрузочно-разгрузочными), движения которых можно ограничивать и направлять с помощью механических упоров или концевых выключателей. Роботу, управляемому программой (заложенной в компьютер), а не с помощью аппаратных средств, необходимы проприорецептивная система и реализуемая с ее помощью обратная связь, поскольку невозможно обеспечить условия, при которых многократное выполнение программы всегда будет давать абсолютно точные результаты. В любой электрической системе присутствуют какие-либо «шумы» или случайные помехи; таким образом, если робот лишен обратной связи, позволяющей ему контролировать свои действия, то, раз сбившись с ритма, он так и не сможет войти в него снова.
Чаще всего для формирования сигналов обратной связи о положении конечностей робота применяется устройство под названием «преобразователь угол—код». Нередко оно используется совместно с электроприводом определенного типа, а именно с шаговым двигателем, вал которого под воздействием импульсных сигналов поворачивается на требуемое число «шагов» в том или ином направлении. После того как шаговый двигатель отработал один из таких сигналов, преобразователь угол—код должен установить новые координаты сочленения, управляемого двигателем, и передать соответствующую информацию на компьютер робота. Это позволит компьютеру определить, соответствует ли реальное положение сочленения координатам, заложенным в его программе: если вал двигателя переместился на шаг больше или меньше, чем необходимо, то компьютер дает команды на корректировку его углового положения.
Точность, с которой такие чувствительные устройства, как преобразователь угол—код, способны измерять положение звена манипулятора, а также четкость его перемещения, обеспечиваемая механизмами привода, —

Система машинного зрения фирмы GMF за работой. Она способна различать 256 полутонов (или уровней серого), что позволяет ей «видеть» отверстия в деталях, куда робот должен вставить свой схват.
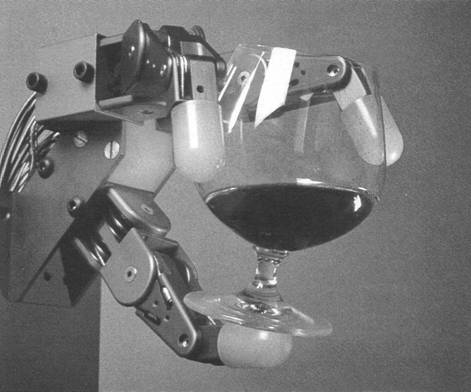
Манипулятор «Сейлсбери» оснащен одним из самых совершенных на сегодняшний день захватных приспособлений. Обретут ли роботы когда-нибудь такое обоняние, чтобы ощущать аромат того, что налито в бокал?
Этот схват, оснащенный кремниевыми тактильными датчиками фирмы TDI, показывает, как далеко шагнула робототехника со времени появления первых примитивных загрузочно-разгрузочных машин.
это важнейшие показатели, определяющие «разрешающую способность» и «воспроизводимость» движений робота. Речь идет о том, насколько точно траектория движения руки робота (или его рабочего органа) будет соответствовать вводимой в него новой программе и с какой степенью точности он будет в дальнейшем повторять предусматриваемые такой программой перемещения. Разрешающая способность и воспроизводимость — две основные характеристики, которые определяют эффективность промышленного робота. Для больших установок, применяемых, например, при точечной сварке, достаточна воспроизводимость с точностью полмиллиметра и даже ниже. Однако для менее крупных роботов, которые разработаны за последнее время для предприятий по сборке прецизионных приборов и инструментов, скажем часов, этот показатель достигает нескольких микрометров — твердости «руки» такого робота мог бы позавидовать даже нейрохирург. В проприорецептивной системе робота могут использоваться и другие датчики. Например, к весьма ценным качествам можно было бы отнести способность робота оценивать массу предмета, которым он манипулирует (т. е. фактически переменную массу его манипулятора); с этой целью он измеряет силы, приложенные к различным шарнирам, при разных положениях звеньев манипулятора. Может также возникнуть потребность в определении не самой скорости перемещения манипулятора(которая, конечно, зависит от массы удерживаемых им объектов), а степени его ускорения или замедления. Необходимость подобной информации обусловлена тем, что груз и манипулятор, оперирующий грузом, обладают инерцией и характер их движения зависит от момента приложенных сил. Нельзя допускать, чтобы рука робота «крутилась» в таком же темпе, как боксер на ринге: она будет действовать эффективно только при постепенном наборе скорости и плавном, регулируемом останове по мере приближения к заданной точке. Разные операции выполняются с различными скоростями: например, робот, производящий окраску распылением, должен, по-видимому, изменять темп перемещения, чтобы обеспечить равномерность нанесения краски, а движение робота, переносящего тигли с расплавленным металлом, должно проходить без резких рывков. Таким образом, система управления роботом должна быть, по всей видимости, достаточно сложной и состоять не из одного контура обратной связи, а из нескольких, в которых к тому же имеются собственные обратные связи. Кроме того, каждое звено манипулятора (т. е. каждую степень свободы) необходимо снабдить отдельным набором датчиков и контуров обратной связи, а компьютер, управляющий роботом как системой, должен обеспечить согласованность действий всех сочленений манипулятора. Этого, в частности, можно добиться, передав некоторые функции принятия решений индивидуальным микропроцессорам, позволяющим — под общим управлением центрального компьютера робота — воспринимать и обрабатывать сигналы обратной связи от одного или нескольких шарниров, обеспечивая перемещение в последних согласно заданной программе. Именно такие механизмы управления действуют в природе. У некоторых насекомых в брюшке имеется своего рода вспомогательный «мозг», управляющий движением их конечностей; даже у людей наиболее быстрые реакции, например инстинктивное отдергивание руки при прикосновении к очень горячим предметам, контролируются нервными центрами спинного, а не головного мозга.

Контуры обратной связи. Чтобы осуществлять «контурное» управление роботом (т. е. обеспечивать его достаточно сложное перемещение с переменной скоростью, а не просто следование кратчайшим маршрутом из «точки в точку»), в состав органов управления должны входить датчики, контролирующие не только положение каждого звена манипулятора, но и скорость, с которой перемещается манипулятор, — независимо от тоге, движется ли он с ускорением или с замедлением, — а также другие параметры движения. Такая информация «обратной связи» и ответные команды циркулируют по нескольким замкнутым контурам. Поскольку информация поступает в систему от каждого датчика, образуются своего рода «контуры в контурах». Сложность организации подобной системы становится очевидной, если учесть, что такие контуры управления требуются для каждого из шести (или более) шарниров робота, а для координации работы всего комплекса необходим еще один уровень управления.