Итак, мы видим, что сначала микророботы разрабатывались в основном для целей обучения, а затем для них стали искать другие области применения. Большинство фирм—изготовителей микророботов поддержали эти поиски. Первая программа для оценки возможностей микророботов была разработана в исследовательском отделе Британского управления по атомной энергии, расположенном в Харуэлле. В ходе испытаний, проведенных Брайаном Пирсом и Тревором Хадлстоуном, были измерены и сопоставлены эксплуатационные показатели и точность действий всех микророботов, имеющихся в продаже. В частности, на протяжении многих месяцев проводились контрольные испытания роботизированного рабочего участка для операций с небольшими образцами радиоактивных изотопов. На тех ранних этапах развития робототехники результаты испытаний оказались неутешительными. Стандартам, разработанным Пирсом, удовлетворяло лишь одно устройство — робот «Альфа» фирмы «Америкэн микробот», первым поступивший в продажу. Как на испытаниях, так и в эксплуатации это устройство оказалось самым точным и надежным.
Результаты испытаний в Харуэлле — первой практической попытки установить объективные стандарты — были до некоторой степени обескураживающими, но не означали полного провала. Мир увидел, что солидное учреждение обратило внимание на «игрушечный» робот, подвергнув его научно обоснованной проверке. Результаты испытаний оказались противоречивыми, однако то были первые шаги микроробота. С тех пор он постоянно совершенствовался, появились новые модели миниатюрных роботов, и, кроме того, получила дальнейшее развитие микрокомпьютерная техника. Однако реальное значение имеют не столько успехи в области технологии, хотя и это существенно, сколько зарождение творческого взгляда на возможности микророботов. Потребуется еще немало времени для выявления важных применений робототехники; некоторые из них очевидны уже сегодня, а другие только начинают вырисовываться.
К числу наиболее очевидных применений микророботов относятся лабораторные эксперименты. Приготовление и анализ проб фармацевтических, химических и пищевых продуктов часто представляют собой многократно повторяющийся и утомительный процесс. Однако этой довольно монотонной работой обычно занимаются весьма квалифицированные и сравнительно высокооплачиваемые работники лабораторий, и для этой работы уже сейчас характерен высокий уровень механизации и даже автоматизации. Без сомнения, в этой области открываются широкие перспективы для использования микророботов.
В Англии идея применения роботов для нужд лабораторий впервые возникла в Государственной химической лаборатории (Лондон). Здесь проведены широкомасштабные исследовательские работы под руководством Дерека Поттера, главы административной службы. Автоматические устройства уже выполняют там самые разнообразные операции. В частности, они осуществляют химическое титрование (перемешивание двух жидкостей до тех пор, пока не произойдет какая-либо реакция). Другие автоматы взвешивают химикаты на чувствительных весах с точностью до 0,0001 г. В процессе взвешивания, титрования или других операций над химикатами лаборанту часто приходится переносить пробы химикатов в виде порошка, колб с жидкостями или химических реактивов с одного рабочего места на другое. Эксперименты по использованию роботов для переноса проб и манипулирования ими ведутся уже длительное время, и сейчас начинают проявляться их результаты. Одна из наиболее часто повторяющихся операций — точное взвешивание проб, о чем говорилось выше. Рабочий участок для выполнения такой операции с помощью небольшого робота создавался в рамках одного из первых проектов, над которыми работали группы исследователей в лабораториях нефтяной, химической, пищевой, фармацевтической и других отраслей промышленности, и полученные результаты обнадеживают. Автоматическая установка проб на весы и регистрация показаний весов с помощью микрокомпьютера до и после обработки проб в настоящее время широко практикуются в лабораториях. Использование небольших роботов для приготовления и анализа проб делает идею безлюдных лабораторий столь же реальной, как и концепцию безлюдного предприятия; последняя, правда, отличается более широким размахом.
Еще одно необычное применение робота — его использование в качестве бармена. Официантка с помощью небольшого микрофона может связаться со стойкой бара, где хозяйничает робот, и передать заказы, выполнением которых он и займется. Подобный бар уже какое-то время функционирует в США: обслуживающий его робот распознает речь и даже может высказывать «свое мнение». Предусмотрена возможность изменения «голоса» робота: днем он может быть женским, а вечером — мужским. Официантка заказывает напитки не отходя от столика, где сидят посетители и, возможно, удаленного на несколько десятков метров от стойки бара. Посетитель слышит передаваемый ею заказ и потому всегда уверен в его правильности. Напитки автоматически наливаются и смешиваются, а официантка в это время обслуживает другие столики. Бар запрограммирован на приготовление до 150 напитков или коктейлей. Калькуляция затрат, выполняемая в этом баре микрокомпьютером, поможет точно определить, во что обходится владельцу простое добавление ломтика лимона к порции напитка. Кроме того, компьютер осуществляет контроль за пополнением запасов исходных продуктов и наличными деньгами; посетитель видит свой заказ, который отображается на экране вместе со стоимостью напитков, суммой денег, полученной в счет оплаты заказа, и причитающейся ему сдачей. Эта система, по всей видимости, исключает всякую возможность ошибок при расчетах между посетителем и владельцем бара. Единственное, чего лишен подобный «бармен», — это способности сочувственно выслушивать сетования посетителей на свои жизненные неурядицы.

Движущиеся роботы призваны помочь инвалидам. Этот самодельный робот демонстрировался на I Международном конгрессе персональных роботов в Альбукерке в 1984 г.
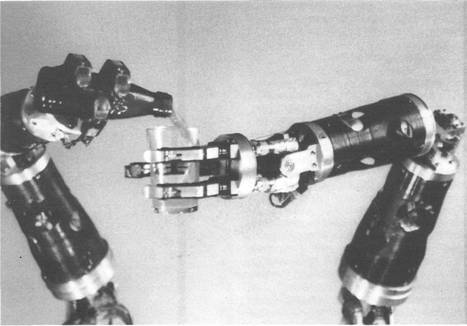
Этот робот, разработанный Фуна-кубо из Токийского университета, предназначен для оказания помощи прикованным к постели пациентам. Два манипулятора робота могут двигаться согласованно, а управление ими в зависимости от возможностей пациента осуществляется голосом, свистом или с помощью клавиатуры.
Совсем иные проблемы возникают при использовании небольших роботов для оказания помощи инвалидам. К. С. Гилл из Брайтонского политехникума (Великобритания) относится к числу исследователей, рассматривающих возможность применения небольшого робота для оказания помощи тем, кто не в состоянии обслуживать себя самостоятельно. Предложенный им проект, целью которого является разработка механических рук, управляемых голосом и реагирующих на команды «вверх, вниз, вперед, назад» и т. д., позволит частично или полностью парализованным людям оперировать различными предметами. Одну почти полностью парализованную молодую пациентку обучили управлять с помощью свиста и гортанных звуков небольшим роботом, который мог кормить ее. В клинике для инвалидов войны в Пало-Альто (шт. Калифорния) ведутся работы над другими проектами, целью которых является установка на инвалидное кресло-каталку небольших манипуляторов, которые помогут парализованным пациентам брать и удерживать нужные предметы. Рассмотренные выше примеры использования микророботов — от детских забав до весьма серьезных применений — иллюстрируют обширные возможности микроробота как универсального инструмента в промышленности, торговле и медицине.

Первый в мире роботизированный бар был открыт в Сан-Франциско корпорацией «Скараб роботикс». Прямо из зала официантка через микрофон передает заказы в бар, где робот автоматически смешивает напитки и подготавливает их к приходу официантки.