Одним из лидеров в области создания автономных подводных аппаратов является канадская фирма «Интернэшнл сабмарин инджиниринг» (ISE), расположенная в Ванкувере. Она провела эксперименты с двумя типами подобных устройств, предназначенных для работы на глубине до 300 м. Фирма также поставляет подводное оборудование обычного типа, устанавливаемое на якорную стоянку, однако, по мнению специалистов фирмы, управляемые компьютерами автономные подводные аппараты, способные плавать среди препятствий и самостоятельно возвращаться на базу, обладают большей универсальностью. Такие аппараты могут плавать дальше и быстрее, поскольку их не сдерживает тяжелый кабель; отсутствие кабеля позволяет аппарату свободнее обходить подводные препятствия. Кроме того, новые устройства дешевле в эксплуатации, так как не требуют постоянного присутствия опытного инженера-оператора.
Аппарат RUM ill будет функционировать под водой на глубинах до 5 км; электроэнергия поступает на него по коаксиальному кабелю длиной 10 км.
Дистанционно управляемый аппарат RUM III, разрабатываемый в Калифорнийском университете, предназначен для изучения морского дна в глубоководных акваториях.
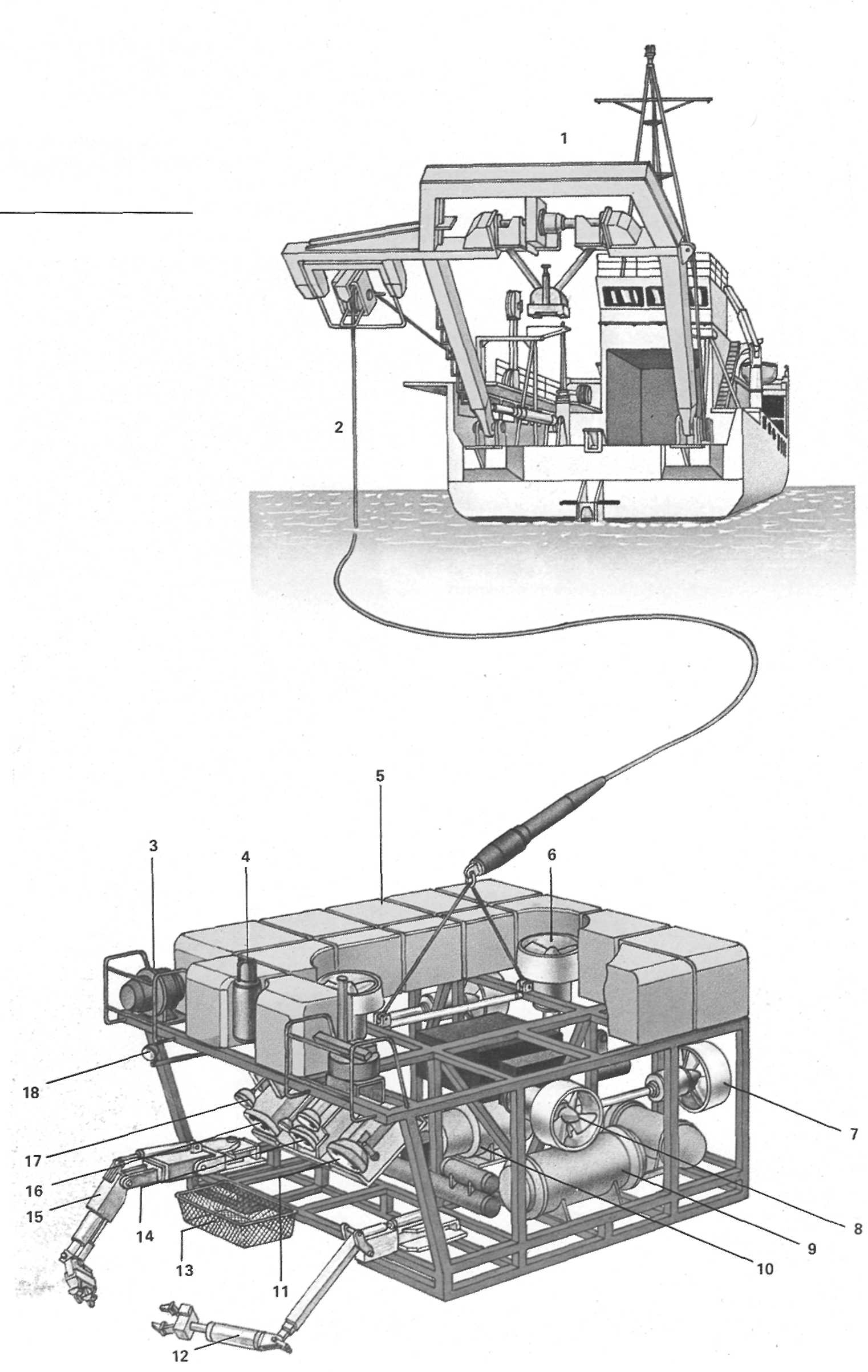
Подводный аппарат «Долфин»: 1 — базовое судно «Нацусима»; 2 — буксировочный кабель; 3 — гидролокатор (сонар) для пеленгации объектов; 4 — ответчик; 5 — пенопластовые блоки; 6 — гребной винт для перемещения аппарата вверх-вниз; 7 — гребной винт для перемещения аппарата вперед-назад; 8 — боковой гребной винт; 9 — контейнер с телеметрической аппаратурой; 10 — гидравлический привод; 11 — фотокамера; 12 — схват-ножницы (пять степеней свободы) с регулируемой скоростью движений; 13 — корзина для сбора образцов; 14 — цветная телекамера; 15 — копирующий манипулятор (семь степеней свободы); 16 — стереоскопическая телекамера; 17,18 — фара.
'Долфин-ЗК' — первый из ряда дистанционно управляемых подводных аппаратов, разработка которых .планируется в Японском центре научно-технических исследований моря (Йокосука). Этот аппарат, сооружение которого должно завершиться в 1986 г., будет самым большим и глубоководным (330 м) из японских подводных роботов. Он предназначен для осмотра подводных сооружений, сбора образцов и ведения геологической разведки на океанском дне. Кроме того, планируется использовать его в качестве исследовательского зонда для обитаемого подводного аппарата 'Синкай-2000'.
Управляемые компьютерами аппараты указанной канадской фирмы стоят 1—2 млн. долл. Они обнаруживают объект с помощью акустических датчиков, которые посылают полученную информацию в компьютеры, управляющие водометными движителями. Перед выходом аппарата в плавание инженеры закладывают в память его компьютера маршрут, по которому аппарат должен следовать; таким образом, он может, например, плыть вдоль нити трубопровода, отыскивая в нем трещины. Это устройство способно плавать в обширном районе океана, разведывая с помощью телекамер различные месторождения, например металлические рудные жилы.
Фирма ISE предлагает аппараты двух типов; оба имеют диаметр около 1 м и длину 10 м. Аппарат ARCS (Autonomous Remote Controlled Submersible — автономный дистанционно управляемый подводный аппарат) может плавать на глубинах до 300 м и питается от батарей. Он передает информацию по акустической линии связи. Второй аппарат, гидрографическая система «Долфин» (Deep Ocean Logging Platform Instrument for Navigation — глубоководная океанская навигационная платформа), опускается лишь на 5 м ниже гребней волн. Он поддерживает связь с оператором с помощью радиосигналов, излучаемых выступающим из воды шноркелем. Шноркель служит также для забора атмосферного воздуха, необходимого дизельному двигателю судна. Аппарат ARCS будет перемещаться со скоростью 8 км/ч, а «Долфин» — в три раза быстрее.

В Центре океанических систем ВМС США в Сан-Диего разработан автономный аппарат для осмотра подводных сооружений, в частности трубопроводов. Аппарат может работать на глубине около 700 м; телевизионные изображения передаются по волоконно-оптической линии связи.

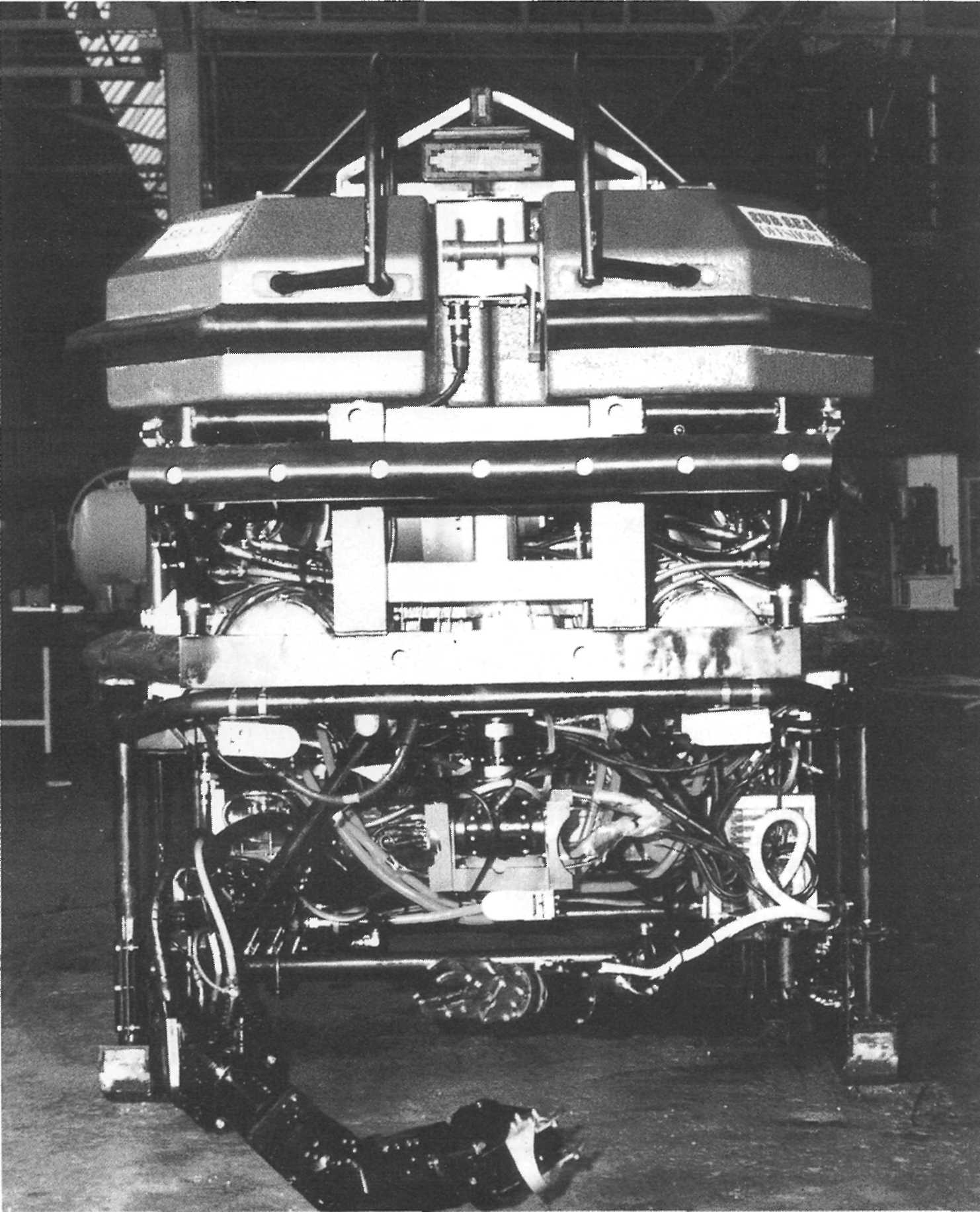
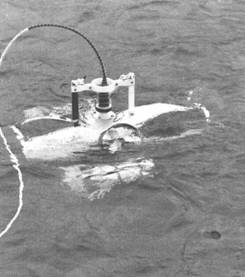
Подводный аппарат обзорного типа «Хорнет-500», оснащенный волоконно-оптической линией связи и приводимый в действие четырьмя гребными винтами, которые управляются микрокомпьютерами. После запуска (внизу) он может погружаться на глубину до 500 м.
Технические характеристики подводных роботов
Тип робота «Осьминог» «Краб» «Акула»
Область применения Сооружения Морское дно Толща воды
Макс, радиус действия датчиков 10 м 100 м 10 км
Мин. точность датчиков 0,1 мм 10 см 1 см
Макс, радиус действия робота 1 км 100 км 1000 км
Мин. точность рабочих органов 0,1 мм 10 см 1 см
Количество манипуляторов более 3 более 1 более 0
Мин. число степеней свободы манипуляторов более 5 более 4 более 2
Макс. грузоподъемность манипуляторов 100 кг 100 кг 2 кг
Конструкция манипуляторов Сменные рабочие органы Сменные рабочие органы Специализированный рабочий орган
Таблица заимствована из доклада Скотта Хармона «Автономные подводные роботы», подготовленного для II Международной конференции по вычислительной технике (1982).
На интересной стадии находится разработка автоматических устройств для подводных работ во Франции. Фирма «Нормд шипъярдз» совместно с французской Комиссией по атомной энергии провела опыты по использованию роботов для очистки корпусов кораблей. Эти устройства, работающие ниже ватерлинии, счищают с корпуса наросты из морских рачков, ухудшающие обтекаемость судна. Система RM3, разработанная фирмой «Нормд шипъярдз», управляется оператором; последний находится либо на корабле, корпус которого очищается, либо на другом судне. Робот, оснащенный одним манипулятором, перемещается весьма оригинальным способом (см. диаграмму на с. 111). В манипуляторе робота можно закрепить щетку или другое устройство, например инструмент для удаления заусенцев, дефектоскопическую телекамеру и даже краскопульт. Оператор передает команды роботу по волоконно-оптической линии связи. В настоящее время разрабатывается наземный вариант робота, RGH1, предназначенный для очистки нефтяных резервуаров и аналогичных крупных сооружений.
Дистанционно управляемый подводный робот Пионер, изготовленный фирмой «Сабей оффшор», может обнаруживать места утечки нефти из трубопроводов и доставлять на поверхность образцы цемента и металла для последующего анализа. Кроме того, он с помощью набора манипуляторов сможет перерезать и распутывать провода.